Abstract
An expression is developed for the velocity at which a particle, moving tangentially on the surface of a body with an arbitrary shape, rotation, and gravitational field, will lift off from that surface and enter orbit. The osculating departure plane in which this lift-off motion occurs is defined by the net particle acceleration and the desired lift-off direction. The body surface is approximated within this plane, at the departure point, with some radius and center of curvature, allowing for a universal, frame-independent lift-off velocity expression. Applying the geometry of plane-ellipsoid intersections, we perform a validation of the full lift-off velocity expression on a number of rotating ellipsoids. Finally, we derive a limit expression for the case of lift-off from a rotating plane, and compare this with the results on curved bodies. This theory has numerous applications to lander/rover surface mobility operations on asteroids, comets, and small moons, as well as to geophysical processes encountered on these bodies.


























Similar content being viewed by others


Notes
As long as \(\varvec{\varOmega }\) and \(\mathbf {r}\) are not parallel, in which case both the centrifugal and Coriolis acceleration would be zero, making lift-off impossible when \(\mathbf {a}_E\) points into the plane.
References
Guibout, V., Scheeres, D.J.: Stability of surface motion on a rotating ellipsoid. Celest. Mech. Dyn. Astron. 87(3), 263–290 (2003)
Klein, P.P.: On the ellipsoid and plane intersection equation. Appl. Math. 3(11), 1634 (2012)
Kubota, T., Yoshimitsu, T.: Intelligent rover with hopping mechanism for asteroid exploration. In: 6th International Conference on Recent Advances in Space Technologies, Istanbul, Turkey, IEEE, pp. 979–984 (2013)
Reill, J., Sedlmayr, H., Neugebauer, P., Maier, M., Krämer, E., Lichtenheldt, R.: MASCOT-asteroid lander with innovative mobility mechanism. In: Proceedings of the 13th Symposium on Advanced Space Technologies in Robotics and Automation, Noordwijk, The Netherlands (2015)
Scheeres, D.J.: Orbital motion in strongly perturbed environments, vol. 1. Springer, Berlin (2012)
Staley, D.: Man on an asteroid. J. Geophys. Res. 75(28), 5571–5573 (1970)
Tardivel, S., Scheeres, D.J., Michel, P., Van wal, S., Sánchez, P.: Contact motion on surface of asteroid. J. Spacecr. Rockets 51(6), 1857–1871 (2014)
Ulamec, S., Biele, J., Delmas, C., Fantinati, C., Gaudon, P., Geurts, K., et al.: Rosetta Lander—Philae: First landing and operations on a comet. In: EGU General Assembly Conference Abstracts, vol. 17, p. 2308 (2015)
Van wal, S., Tardivel, S., Scheeres, D.J.: Exploring small body surfaces with landed pods. In: 12th International Planetary Probe Workshop, Cologne, Germany (2015)
Werner, R.A., Scheeres, D.J.: Exterior gravitation of a polyhedron derived and compared with harmonic and mascon gravitation representations of asteroid 4769 Castalia. Celest. Mech. Dyn. Astron. 65(3), 313–344 (1996)
Acknowledgments
This research was supported by NASA’s SSERVI program (Institute for the Science of Exploration Targets) through institute grant number NNA14AB03A.
Author information
Authors and Affiliations
Corresponding author
Appendices
Appendix 1: Glossary
See Table 1.
Appendix 2: The \(\hat{\mathbf {b}}_\rho \) vector
In Sect. 2, we discussed the geometry of the surface normal \(\hat{\mathbf {N}}\) and the \(\hat{\mathbf {b}}_\rho \) unit vector, and how the two point in the same direction but are generally not perfectly parallel. Here, we present a brief study on the relative geometry of the two vectors on a general ellipsoid. In Fig. 27, we show the intersection ellipse between a general ellipsoid and a selected departure plane.

Sample intersection geometry on a general ellipsoid

Sample intersection geometry on a general ellipsoid, view along the intersection plane
Details of that same geometry are shown in Figs. 28 and 29. These figures show that \(\hat{\mathbf {N}}\) is indeed normal to the three-dimensional surface at \(\mathbf {P}\), and that \(\hat{\mathbf {b}}_\rho \) is normal to the two-dimensional curvature of the intersection ellipse at \(\mathbf {P}\), with the latter lying in the departure plane. The two vectors are very clearly not parallel, though we can see from Fig. 29 that \(\hat{\mathbf {N}}\), \(\hat{\mathbf {b}}_\rho \), and \(\hat{\mathbf {b}}_\delta \) are coplanar and all perpendicular to the departure direction \(\hat{\mathbf {b}}_\theta \).

Sample intersection geometry on a general ellipsoid, view onto the intersection plane
The angle between \(\hat{\mathbf {N}}\) and \(\hat{\mathbf {b}}_\rho \) is readily computed as \(\delta =\sin ^{-1}{( \hat{\mathbf {N}}\cdot \hat{\mathbf {b}}_\rho ) }\), which may be repeated across the surface of a body while varying the departure direction \(\eta \). This allows for a computation of the maximum \(\delta \) distribution across the surface, as is shown in Fig. 30 for the general ellipsoid used previously. We see that the angle reaches a maximum of \(\sim 30^\circ \), but generally assumes smaller values around \(15^\circ \), and reduces to zero around the semi-axes of the ellipsoid. The latter fact is expected, as \(\mathbf {g}\) is aligned with \(\hat{\mathbf {N}}\) in the locations, such that any arbitrary \(\eta \) will result in parallel \(\hat{\mathbf {N}}\) and \(\hat{\mathbf {b}}_\rho \) vectors.

Distribution of the maximum angle between \(\hat{\mathbf {N}}\) and \(\hat{\mathbf {b}}_\rho \) across the surface of a general ellipsoid with \(a=200\,\hbox {m}\), \(b=100\,\hbox {m}\), and \(c=50\,\hbox {m}\)
Appendix 3: Alternative expression
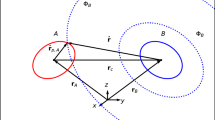
An alternative version of Eq. 16 can be developed by expressing the relevant vectors using their respective components in some reference frame. For this, we modify the problem geometry and introduce a third, rotating reference frame \(\mathcal {E}\):
where the \(\hat{\mathbf {e}}_\sigma \) axis is aligned with the \(\mathbf {CS}\) vector, \(\hat{\mathbf {e}}_\tau =\hat{\mathbf {e}}_\sigma \times \hat{\mathbf {i}}_3\), and \(\hat{\mathbf {e}}_\beta \) orthogonally completes the reference frame. This additional reference frame is included in the expanded geometry of Fig. 31.

(left) Full and (right) departure plane geometry applied in the alternative derivation of the lift-off velocity
The angular velocities of the \(\mathcal {E}\)- and \(\mathcal {B}\)-frame relative to the inertial \(\mathcal {I}\)-frame may be written as:
where the rotation components are found as:
In these equations, \([\mathcal {EI}]\) and \([\mathcal {BI}]\) are the rotation matrices expressing the orientation of the \(\mathcal {E}\)- and \(\mathcal {B}\)-frame relative to the inertial \(\mathcal {I}\)-frame. Using these frames, the position \(\mathbf {r}\) of a particle departing from the surface of the targeted body can be expressed as:
Applying the transport theorem to obtain the inertial derivative of this position, we find for the velocity of the particle:
As the departure point \(\mathbf {P}\) is fixed relative to the target body, it holds that \(\dot{\sigma }=\dot{\rho }=0\). We also assume again that the body is in uniform rotation, such that \(\dot{\varvec{\varOmega }}=0\). Substituting this into Eq. 60 along with the respective angular velocities given by Eq. 57, we may write:
Carring out the cross products, we obtain for the velocity of the particle:
Applying the transport theorem once again to obtain the inertial derivative of the particle velocity, we may express the acceleration of the particle as:
Using again that \(\dot{\sigma }=\dot{\rho }=\dot{\varvec{\varOmega }}=0\), and substituting the respective angular velocities, we can rewrite the above expression as:
Carrying out the cross products yields:
Collecting terms and using the \([\mathcal {BE}]=[\mathcal {BI}][\mathcal {EI}]^{-1}=[\hat{\mathbf {v}}_1,\hat{\mathbf {v}}_2,\hat{\mathbf {v}}_3]\) rotation matrix to transform the \(\mathcal {E}\)-frame rotation components into the \(\mathcal {B}\)-frame, we may write this as:
Separating out the acceleration along the \(\hat{\mathbf {b}}_\rho \) direction and applying Newton’s second law of motion, we get that:
where \(\hat{\mathbf {v}}_1\) is the first column of the \([\mathcal {BE}]\) rotation matrix. When the particle performs a circular motion about \(\mathbf {S}\) at a distance of \(\rho \), it must hold that the angular velocity \(\dot{\theta }\) and lift-off velocity are related through \(\dot{\theta }=V_{\theta }/\rho \). Substituting this into the above and rewriting yields:
This can finally be solved for the lift-off velocity \(V_{\theta }\) as:
where \(a_{E,\rho }\) is the projection of the external acceleration \(\mathbf {a}_E\) at the departure point \(\mathbf {P}\) onto the \(\hat{\mathbf {b}}_\rho \) axis. Please note that this expression is equivalent to the vectorial form of the lift-off velocity derived earlier in Eq. 16.
Rights and permissions
About this article

Cite this article
Van wal, S., Scheeres, D.J. The lift-off velocity on the surface of an arbitrary body. Celest Mech Dyn Astr 125, 1–31 (2016). https://doi.org/10.1007/s10569-016-9671-6
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10569-016-9671-6