
Abstract
Spatial synchrony can increase extinction risk and undermines metapopulation persistence. Both dispersal and biotic interactions can strongly affect spatial synchrony. Here, we explore the spatial synchrony of a tri-trophic food chain in two patches connected by density-dependent dispersal, namely the strategies of prey evasion (PE) and predator pursuit (PP). The dynamics of the food chain are depicted by both the Hastings–Powell model and the chemostat model, with synchrony measured by the Pearson correlation coefficient. We use the density-independent dispersal in the system as a baseline for comparison. Results show that the density-independent dispersal of a species in the system can promote its dynamic synchrony. Dispersal of intermediate species in the tri-trophic food chain is the strongest synchronizer. In contrast, the density-dependent PP and PE of intermediate species can desynchronize the system. Highly synchronized dynamics emerged when the basal species has a strong PE strategy or when the top species has a moderate PP strategy. Our results reveal the complex relationship between density-dependent dispersal and spatial synchrony in tri-trophic systems.
Similar content being viewed by others

Introduction
The spatial dynamics of metapopulations have become increasingly relevant both theoretically and empirically, especially when facing the current global environmental changes (Sih et al. 2000). In particular, anthropogenic-driven landscape fragmentation has become the main cause of species loss (Bascompte and Solé 1998). The persistence of metapopulations depends heavily on the spatial synchrony of local population sizes, whether they fluctuate with the same direction or compliment with each other (Ylikarjula et al. 2000). A high level of spatial synchrony has been associated with enhance risk of metapopulation extinction (Allen et al. 1993; Heino et al. 1997; Earn et al. 2000; Kendall et al. 2000; Liebhold et al. 2004; Li et al. 2005). In contrast, asynchronous dynamics can often prevent extinction risk through either re-colonization or the “rescue effect” (Brown and Kodric-Brown 1977). Such spatial synchrony and asynchrony have been detected across a wide range of taxa and regions (Bjørnstad et al. 1999; Koenig 1999; Liebhold et al. 2004). To this end, identifying key drivers of spatial synchrony is of crucial importance for successful conservation management (Earn et al. 2000) and pest/disease control (Grenfell et al. 2001; Abbott and Dwyer 2011).
How dispersal (or migration) affects spatial synchrony remains debatable. Some studies have concluded that dispersal can drive spatial synchrony (Holmes et al. 1994; Ranta et al. 1995; Haydon and Steen 1997; Matter 2001; Abbott 2011), while others question its generality and even suggest the opposite (Ylikarjula et al. 2000; Ims and Andreassen 2005). In particular, negative density-dependent dispersal can disrupt synchronized dynamics of local populations (Ylikarjula et al. 2000; Ims and Andreassen 2005). Depending on dispersal mode (Ruxton 1996), dispersal could lead to either spatial asynchrony through spatially induced chaos or spatial synchrony through phase-locking of cyclic population sizes (Gyllenberg et al. 1993; Jansen 1999).
The scene becomes even muddier when further consider biotic interactions between species in a metacommunity where both dispersal and biotic interactions affect the spatial synchrony (Wilson 1992; Holt 1997). Tri-trophic food chain is most common in nature (Soufbaf et al. 2012; Zhao et al. 2013, 2014, 2015; Shi et al. 2014). For instance, Koelle and Vandermeer (2005) showed that the reduction of between-patch distance in a tri-trophic food chain could deter spatial synchrony. Belykh et al. (2009) further showed that it is the dispersal of the intermediate species in the tri-trophic system that promotes spatial synchrony. Although both studies only used the density-independent dispersal strategy in their analyses, these works have nonetheless demonstrated the complex role of biotic interactions and density-independent dispersal strategies in promoting spatial synchrony.
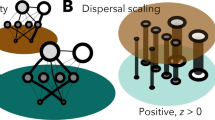
Here we explore the effects of two density-dependent dispersal behaviours, namely predator pursuit (PP) and prey evasion (PE), on the spatial synchrony of a tri-trophic food-chain system. PP describes the movement of predators from patches of low to high prey density (McCann et al. 2000), while PE describes the movement of prey from patches of high to low predator density (Tsyganov et al. 2004). The effects of PE and PP on metapopulation dynamics have been investigated in a semi-discrete framework (Li et al. 2005), showing that these dispersal behaviours can reduce the spatial synchrony of both predators and prey and promote population persistence (Ramanantoanina et al. 2011). A similar work using a discrete framework has shown that both PP and PE can desynchronize the spatial synchrony and PP has a weaker desynchronizing effect than PE (Ramanantoanina et al. 2011).
We develop a simple metacommunity model consisting of only two habitat patches, each of which harbours a tri-trophic food chain. Connection between these two patches is done through density-dependent dispersal of one or more species. The local tri-trophic food chain is depicted by the Hastings–Powell model and the chemostat model. Both models can exhibit complex dynamics, although the former is often used for forecasting long-term dynamics of animal populations, while the latter is often used for depicting the food chain dynamics of microbes in well-mixed liquid media. Using both models will allow us to not only assess the robustness of the results but also the generality to cover a wide range of taxa. Specifically, we examine the effect of density-dependent dispersal at different trophic levels on the spatial synchrony of the basal species and of the entire food chain.
Methods
Two-patch tri-trophic food chain model
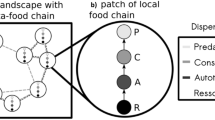
Let each habitat patch contain a food chain consisting of a basal species (R), an intermediate species (C) and a top predator (P). We assume continuous densities of all species and ignore any life stages. To investigate the influences of PP and PE on spatial synchrony, we construct the following two-patch tri-trophic food chain model:
Without dispersal, this model collapses to the well-known Hastings–Powell model (Hastings and Powell 1991; McCann and Hastings 1997), where \(R_i, C_i\) and \(P_i\) refer to the population sizes of the three species in patch i (\(i = 1,2\)). Parameter K is the carrying capacity of basal species; \(R_0\) and \(C_0\) are the half saturation densities of R and C, respectively. The parameter \(x_k\) is the mass-specific metabolic rate of species k (\(k = C, P\)), measured relative to the production-to-biomass ratio of the resource population. The parameter \(y_k\) is a measure of ingestion rate per unit metabolic rate of species k. Dispersal rates between patches are given by \(m_R\), \(m_C\) and \(m_P\). The dispersal of prey caused by PE is determined by the gradient of predator density, and the dispersal of predators caused by PP is determined by the gradient of prey density (McCann et al. 2000; Tsyganov et al. 2004; Li et al. 2005). Here, the parameter \(e_R\) (\(e_R \ge 0\)) denotes the PE intensity of the basal species. The parameters \(e_C\) (\(e_C \ge 0\)) and \(p_C\) (\(p_C \ge 0\)) represent the PE and PP intensity of the intermediate species. The parameter \(p_P\) (\(p_P \ge 0\)) describes the PP intensity of the top species. Specially, species dispersal is density independent in the absence of PE and PP.
The chemostat model is another tri-trophic food chain model that has been studied intensively in the literature (Kooi et al. 1997). This type of model is often used for studying the food chains of microorganisms in well mixed liquid media (Boer et al. 2001). The dynamics of the tri-trophic food chain is described by the following system of ordinary differential equation:
where d is the dilution rate of the chemostat, and \(x_r\) is the concentration of the input substrate. The parameters \(a_1,a_2,a_3\) and \(k_1,k_2,k_3\) are, respectively, the maximum specific ingestion rate and the half-saturation constant of trophic level R, C, P. The meaning of other symbols is the same as the system 1. The asymptotic behaviour of this model has been analyzed in detail by Boer et al. (2001). They showed that a chaotic attractor can occur when the appropriate initial condition and fixed parameters are chosen. The values of the parameters are given as: \(a_1=5, a_2=2, a_3=1.5, k_1=0.16, k_2=0.45, k_3=0.833, x_r=4.0, d=0.8732\). These parameter values are relevant for a tri-trophic microbial food chain in the chemostat consisting of bacteria consumed by ciliates which are consumed by carnivorous ciliates (Kooi et al. 1997).
Numerical simulations
Population synchrony can be measured in a variety of ways, such as the Pearson moment correlation coefficient and phase difference between population cycles (see Buonaccorsi et al. 2001). Here, we chose the Pearson moment correlation coefficient (r), which is computed as described in Bjørnstad et al. (1999). If \(0 < r \le 1\), subpopulations between patches are in-phase synchronized, with larger values of r indicating stronger synchrony. If \(-1 \le r < 0\), subpopulations between patches are anti-phase synchronized, with lower values of r signalling desychronization. The index \(r = 0\) represents the independence of the two local populations. We test the sensitivity of spatial synchrony by examining how coefficient r changes with model parameters (Ramanantoanina et al. 2011).
To set up the initial condition for the simulation, we prohibited cross-patch dispersal. We assigned two sets of baseline values to the model parameters of the three species in these two isolated patches as following: for chaotic dynamics \(x_C=0.40, x_P=0.08, y_C=2.009, y_P=5.00, R_0 = 0.16129\) and \(C_0=0.5\); for limit cycles \(x_C=0.40, x_P=0.15, y_C=2.009, y_P=5.00, R_0=0.33\) and \(C_0=0.5\). The systems under these parameters represent two food chains reported in McCann and Hastings (1997). We then explored how changing the values of dispersal ability affects the spatial synchrony of these two food chains. We numerically solved the differential equations from \(t = 0\) to 5000 using the Runge–Kutta method implemented in MatLab (Mathworks, Inc.) and used the populations sizes at \(t = 4000, 4001,\ldots ,5000\) for calculating the Pearson Moment correlation coefficient.
In the following the density-independent dispersal case (\(e_R=e_C=p_C=p_P=0\)) serves as the baseline for comparison. We first allow only one species to disperse in system 1; in so doing the role of dispersal can be examined separately for each species. We then relax the system to allow all species to disperse for comparison. To examine whether the results are generic, we conduct a sensitivity test by changing the half saturation density \(R_0\) of species R in patch 2 across a wide enough range to encompass both limit cycles and chaotic behaviour in the system. We further ensure the robustness of the results by comparing the sensitivity of spatial synchrony to changing intensities of density-dependent dispersal in both system 1 and 2.
Results
For density-independent dispersal in system 1 (under two parameter settings: chaotic cycle and limit cycle), spatial synchrony was largely enhanced with the increase of dispersal rate in any species but with a few exceptions (Fig. 1). Here, chaotic cycle refers to motions which behave cyclically and chaotically simultaneously (Akhmet and Fen 2015). Specifically, for the scenario when only the basal species could disperse (top panel in Fig. 1), the synchrony of non-dispersal species (the intermediate and top species) became desynchronised when the dispersal rate of basal species exceeded a certain threshold (\(m_R > 0.15\)). For the scenario when only the intermediate species could disperse (middle panel in Fig. 1), the spatial synchrony of all species maintained at a perfect level (\(r = 1\)) when the dispersal rate is above a low threshold (\(m_C > 0.1\)). For the scenario when only the top species could disperse (bottom panel in Fig. 1), the spatial synchrony of all species immediately reached a perfect level (\(r = 1\)) but the non-dispersal species (the basal and intermediate species) dropped to a moderate level when the dynamics is chaotic cycle. Moreover, the dynamics of limit cycle (right panel in Fig. 1) are more synchronized than the dynamics of chaotic cycle (left panel in Fig. 1).

Effects of density-independent dispersal on spatial synchrony. Species R is represented by solid lines, species C by dashed lines, and species P by dotted lines. Synchrony is measured for system 1 (Eq. 1) by Pearson’s r. Left panel represents the system with chaotic cycles, and right panel with limit cycles. Panels from top to bottom represents scenarios that only allow the basal, intermediate and top species to disperse, respectively. Parameter values for left panel: \(x_C=0.40, x_P=0.08, y_C=2.009, y_P=5.00, R_0=0.16129, C_0=0.5\); for right panel: \(x_C=0.40, x_P=0.15, y_C=2.009, y_P=5.00, R_0=0.33, C_0=0.5\)
For density-dependent dispersal (i.e., considering PE and PP) in both systems, we have the following scenarios depending on which species is allowed to disperse. First, when only the basal species could disperse to evade from predation (Fig. 2), high synchrony of basal species was observed with chaotic cycles for high intensity of PE (\(e_R > 0.5\)) and high dispersal rate (\(m_R > 0.25\)) and with limit cycles for high intensity of PE (\(e_R > 0.2\)). Second, when only the intermediate species could disperse, the density-dependent PP and PE of intermediate species can desynchronize the system (top left section in Fig. 3a, c). However, high synchrony of basal species was observed for chaotic cycles (bottom right section in Fig. 3a, c). That is to say the strength of dispersal is more effective for spatial synchrony than its density dependence. Similar but much synchronized results were observed for limit cycles (Fig. 3b, d). Finally, when only the top species could disperse, high synchrony of basal species was found when the top species has a moderate PP strategy with chaotic cycles (Fig. 4a) and was ubiquitous with limit cycles (Fig. 4b).

Synchrony of basal species as a function of the PE intensity (\(e_R\)) and dispersal rate (\(m_R\)) of basal species. Grey level indicates Pearson’s r. Parameter values are the same as in Fig. 1 except \(m_C=m_P=0\)

Synchrony of basal species as a function of the PE and PP intensity (\(e_C\), \(p_C\)) as well as the dispersal rate (\(m_C\)) of intermediate species. Parameter values are the same as in Fig. 1 except \(m_R=m_P=0\). Left panel represents the system with chaotic cycles, and right panel with limit cycles

Synchrony of basal species as a function of the PP intensity (\(p_P\)) and dispersal rate (\(m_P\)) of top species. Parameter values are the same as in Fig. 1 except \(m_R=m_C=0\)
The spatial synchrony clearly depended on the dynamic behaviour (governed by changing the value of \(R_0\) in patch 2), yet the underlying pattern remains consistent: highly synchronized dynamics is observed for strong PE of basal species and the synchrony decreases with the increasing \(p_P\) when \(R_0\) of patch 2 is below a certain threshold, beyond which the pattern could be different (Fig. 5). For example, when \(R_0 > 0.25\) the synchrony of basal species became weaker with increasing PE intensity (\(e_R\)) (Fig. 2a vs Fig. 5a); intermediate level of PP intensity (\(p_P\) around 10) desynchronizes the dynamics of basal species especially when \(R_0 > 0.3\) (Fig. 4a vs Fig. 5b).

Synchrony of basal species as a function of parameter \(R_0\) of patch 2 and density-dependent dispersal of basal species (\(e_R\)) and top species (\(p_P\)). Parameters are the same as in left panel of Fig. 1 except \(m_R = 0.25\) in the left plot and \(m_P=0.25\) in the right plot, and \(R_0=0.16\) in patch 1
When all species can disperse (Fig. 6), increasing PE intensity of basal species strengthens the synchrony of basal species (Fig. 6a) while increasing PE of intermediate species desynchronizes the dynamics of basal species (Fig. 6b). Compared with the results from system 2 (Fig. 6c, d ), our results are rather robust to different types of models.

Synchrony of basal species as a function of the PP intensity (\(p_P\)) of top species and the PE intensity (\(e_R\)) of basal species (left plot), and a function of the PP (\(p_C\)) and PE intensities (\(e_C\)) of intermediate species, for system 1 (top panel) and system 2 (bottom panel). Parameter values are, for top left: \(m_R=0.3,\,m_C=m_P=0.01, e_C=p_C=10\); top right: \(m_R=0.3, m_C=m_P=0.01, e_R=0.3, p_P=10\); bottom left same as top left except \(e_C=p_C=20\); bottom right same as top right except \(e_R=1\)
Discussion
The effect of dispersal on synchrony in systems with multiple interacting species has been of interest. For example, Tobin and Bjørnstad (2005) showed how spatial association between natural enemies and victims can emerge in locally unstable populations via dispersal. Jansen (1994) also examined the role of dispersal in stabilizing a tri-trophic system in patchy environments. In contrast, our results suggest that considering species interactions do not alter the overall conclusion that dispersal of high trophic species promotes synchrony of the same species while dispersal of low trophic species desynchronizes the system. In particular, the dispersal of basal species cannot synchronize the intermediate and top species. The effect of dispersal on synchrony is difficult to perpetuate across different trophic levels, consistent with Belykh et al. (2009) and Koelle and Vandermeer (2005). As is the case for consumer-resource interactions (Vandermeer 2004), when only the intermediate or top species is allowed to disperse, we expect enhanced synchrony from dispersal; when only the basal species is allowed to disperse, we expect weakened synchrony from dispersal. Considering density-dependent dispersal (PP and PE) complicated the model outcome. PE and PP have been found to desynchronize dynamics in predator-prey systems (Li et al. 2005; Ramanantoanina et al. 2011). In contrast, we demonstrated that PP and PE of intermediate species could desynchronize the tri-trophic food chain. However, a moderate intensity of PP of top species did synchronize the system, consistent with Zhang et al. (2008). In addition, strong PE of basal species can synchronize dynamics, which have not been observed for single- or two-species systems. Intuitively, spatial synchrony is low when the dispersal of basal species is density independent. When the behaviour of prey evasion is present, dispersal prey has a ‘refuge’ in the patch with low predator densities, while the remaining prey in the original patch is being depleted by predators (Ramanantoanina et al. 2011). As a consequence, spatial heterogeneity of predation risk can induce spatial asynchrony. However, the combination of two desynchronizing factors can lead to highly synchronized dynamics. Although the results are clearly dependent on the dynamic complexity (controlled by adjusting \(R_0\)), the underlying pattern remains consistent when the quality of the two patches is rather small (similar \(R_0\)). When the difference between habitat qualities increases (Fig. 5), different results can be expected. Density-independent dispersal can improve system persistence via rescue effect, yet also increase spatial synchrony and thus extinction risk (Allen et al. 1993; Heino et al. 1997). Adding to this, our results suggest that density-dependent dispersal (e.g., PP and PE) could be beneficial to species persistence through desynchronizing dynamics of local populations, consistent with Ylikarjula et al. (2000) who argued that the level of synchrony is very much dependent on the dispersal strategy used. Of course, PP and PE are not the only density-dependent dispersal strategies; other strategies do exist such as those due to Allee effect and crowding (Hui et al. 2012) which can also be important for spatial synchrony (Ylikarjula et al. 2000; Ims and Andreassen 2005). We here only examined two connected local communities. Ylikarjula et al. (2000) have shown that both population dynamics and synchrony differ markedly between systems of only two and larger numbers of local populations. As such, general conclusions can only be sought with caution. Many theoretical studies on spatial synchrony have used a much larger spatial dimension (e.g., coupled lattice maps) to illustrate that the emerged spatial patterns can also shape synchrony. For example, the selforganizing spatial patterns (i.e., spatial chaos, spiral waves or crystal lattices) can be generated by spatially extended host–parasitoid interactions, depending on the relative and absolute mobility of interacting species (Bjørnstad and Bascompte 2001). Each of these three types of dynamics can be distinguished by their unique distance decay of spatial correlation for pairwise and multiple patches (Hui and McGeoch 2008, 2014), a more powerful measure of spatial synchrony. Future works could bring tri-trophic systems into a large spatial dimension with multiple patches. Species are often embedded in a large ecological network (Zhang et al. 2011; Hui et al. 2013; Minoarivelo et al. 2014) that could have strong impacts on the effect of dispersal on synchrony. In an entangled food web, the role of dispersal on synchrony could have a ripple effect across the web through direct and most likely indirect biotic interactions. The inclusion of species with different life stages or age structures, with different dispersal strategies at development stages, will further complicate the system dynamics (Du et al. 2008) and muddle the role of dispersal on synchrony. Moreover, processes other than dispersal could affect spatial synchrony. Both the Moran effect of environmental forcing and nomadic predators could synchronize population dynamics. In particular, colored environmental noise could affect spatial synchrony by affecting the efficacy of Moran effect (Vasseur 2007). Extension of our simple tri-trophic model along these potential directions using other analytical stability methods (Pecora and Carroll 1998; Belykh et al. 2004) warrants future attention.
References
Abbott K (2011) A dispersal-induced paradox: synchrony and stability in stochastic metapopulations. Ecol Lett 14:1158–1169
Abbott K, Dwyer G (2008) Using mechanistic models to understand synchrony in forest insect populations: the north gypsy moth as a case study. Am Nat 175:613–624
Akhmet M, Fen MO (2015) Entrainment of chaos. In: Akhmet M, Fen MO (eds) Replication of chaos in neural networks, economics and physics. Springer, Berlin, pp 127–156
Allen JC, Schaffer WM, Rosko D (1993) Chaos reduces species extinction by amplifying local population noise. Nature 364:229–232
Bascompte J, Solé RV (1998) Modeling spatio-temporal dynamics in ecology. Springer, Berlin
Belykh VN, Belykh IV, Hasler M (2004) Connection graph stability method for synchronized coupled chaotic systems. Phys D 195:159–187
Belykh I, Piccardi C, Rinaldi S (2009) Synchrony in tritrophic food chain metacommunities. J Biol Dyn 3:497–514
Bjørnstad ON, Bascompte J (2001) Synchrony and second-order spatial correlation in host–parasitoid systems. J Anim Ecol 70:924–933
Bjørnstad ON, Ims RA, Lambin X (1999) Spatial population dynamics: analyzing patterns and processes of population synchrony. Trends Ecol Evol 14:427–432
Boer MP, Kooi BW, Kooijman SALM (2001) Multiple attractors and boundary crises in a tri-trophic food chain. Math Biosci 169:109–128
Brown J, Kodric-Brown A (1977) Turnover rates in insular biogeography: effect of immigration on extinction. Ecology 58:445–449
Buonaccorsi JP, Elkinton JS, Evans SR, Liebhold AM (2001) Measuring and testing for spatial synchrony. Ecology 82:1668–1679
Du YH, Pang PYH, Wang MX (2008) Qualitative analysis of a prey predator model with stage structure of the predator. SIAM J Appl Math 69:596–620
Earn DJD, Levin SA, Rohani P (2000) Coherence and conservation. Science 290:1360–1364
Grenfell B, Bjørnstad ON, Kappey J (2001) Travelling waves and spatial hierarchies in measles epidemics. Nature 414:716–723
Gyllenberg M, Söderbacka G, Ericsson S (1993) Does migration stabilize local population dynamics? Analysis of a discrete metapopulation model. Math Biosci 118:25–49
Hastings A, Powell T (1991) Chaos in a three-species food chain. Ecology 72:896–903
Haydon D, Steen H (1997) The effects of large-and small-scale random events on the synchrony of metapopulation dynamics: a theoretical analysis. Proc R Soc B Biol Sci 264:1375–1381
Heino M, Kaitala V, Ranta E, Lindström J (1997) Synchronous dynamics and rates of extinction in spatially structured populations. Proc R Soc B Biol Sci 264:481–486
Holmes EE, Lewis MA, Banks JE, Vet RR (1994) Partial differential equations in ecology: spatial interactions and population dynamics. Ecology 75:17–29
Holt RD (1997) From metapopulation dynamics to community structure: some consequences of spatial heterogeneity. In: Hanski IA, Gilpin ME (eds) Metapopulation biology: ecology, genetics, and evolution. Academic Press, San Diego, pp 149–164
Hui C, McGeoch MA (2008) Does the self-similar species distribution model lead to unrealistic predictions? Ecology 89:2946–2952
Hui C, McGeoch MA (2014) Zeta diversity as a concept and metric that unifies incidence based biodiversity patterns. Am Nat 184:684–694
Hui C, Roura-Pascual N, Brotons L, Robinson RA, Evans KL (2012) Flexible dispersal strategies in native and non-native ranges: environmental quality and the ‘good-stay, bad-disperse’ rule. Ecography 35:1024–1032
Hui C, Richardson DM, Pyšek P, Le Roux JJ, Kučera T, Jarošík V (2013) Increasing functional modularity with residence time in the co-distribution of native and introduced vascular plants. Nat Commun 4:2454
Ims RA, Andreassen HP (2005) Density-dependent dispersal and spatial population dynamics. Proc R Soc B Biol Sci 272:913–918
Jansen VA (1994) Effects of dispersal in a tri-trophic metapopulations model. J Math Biol 34:195–224
Jansen VA (1999) Phase locking: another causes of synchrony in predator–prey systems. Trends Ecol Evol 14:278–279
Kendall JBE, Bjørnstad ON, Bascompte J, Keitt TH, Fagan WF (2000) Dispersal, environmental correlation and spatial synchrony in population dynamics. Am Nat 155:628–635
Koelle K, Vandermeer J (2005) Dispersal-induced desynchronization: from metapopulations to metacommunities. Ecol Lett 8:167–175
Koenig WD (1999) Spatial autocorrelation of ecological phenomena. Trends Ecol Evol 14:22–26
Kooi BW, Boer MP, Kooijman SALM (1997) Complex dynamic behaviour of autonomous microbial food chain. J Math Biol 36:24–40
Li Z, Gao M, Hui C, Han X, Shi H (2005) Impact of predator pursuit and prey evasion on synchrony and spatial patterns in metapopulation. Ecol Model 185:245–254
Liebhold A, Walter D, Koenig WD, Bjørnstad ON (2004) Spatial synchrony in population dynamics. Annu Rev Ecol Evol Syst 35:467–490
Matter SF (2001) Synchrony, extinction, and dynamics of spatially segregated, heterogeneous populations. Ecol Model 141:217–226
McCann K, Hastings A (1997) Re-evaluating the omnivory–stability relationship in food webs. Proc R Soc B Biol Sci 264:1249–1254
McCann K, Hastings A, Harisson S, Wilson W (2000) Population outbreaks in discrete world. Theor Popul Biol 57:97–108
Minoarivelo HO, Hui C, Terblanche JS, Kosakovsky Pond SL, Scheffler K (2014) Detecting phylogenetic signal in mutualistic interaction networks using a Markov process model. Oikos 123:1250–1260
Pecora LM, Carroll TL (1998) Master stability functions for synchronized coupled systems. Phys Rev Lett 80:2109–2112
Ramanantoanina A, Hui C, Ouhinou A (2011) Effects of density-dependent dispersal behaviours on the speed and spatial patterns of range expansion in predator–prey metapopulations. Ecol Model 222:3524–3530
Ranta E, Kaitala V, Lindström L (1995) Synchrony in population dynamics. Proc R Soc B Biol Sci 262:113–118
Ruxton GD (1996) Dispersal and chaos in spatially structured models: individual-level approach. J Anim Ecol 65:161–169
Shi PJ, Hui C, Men XY, Zhao ZH, Ouyang F, Ge F, Jin XS, Cao HF, Li BL (2014) Cascade effects of crop species richness on the diversity of pest insects and their natural enemies. Sci China Ser C 57:718–725
Sih A, Jonsson BG, Luikart G (2000) Habitat loss: ecological, evolutionary and genetic consequences. Trends Ecol Evol 15:132–134
Soufbaf M, Fathipour Y, Hui C, Karimzadeh J (2012) Effects of plant availability and habitat size on the coexistence of two competing parasitoids in a tri-trophic food web of canola, diamondback moth and parasitic wasps. Ecol Model 244:49–56
Tobin PC, Bjørnstad ON (2005) Roles of dispersal, stochasticity, and nonlinear dynamics in the spatial structuring of seasonal natural enemy-victim populations. Popul Ecol 47:221–227
Tsyganov MA, Brindley J, Holden A, Biktashev VN (2004) Soliton-like phenomena in one-dimensional cross-diffusion systems: a predator–prey pursuit and evasion example. Phys D 197:18–33
Vandermeer J (2004) Coupled oscillations in food webs: balancing competition and mutualism in simple ecological models. Am Nat 163:857–867
Vasseur DA (2007) Environmental colour intensifies the Moran effect when population dynamics are spatially heterogeneous. Oikos 116:1726–1736
Wilson DD (1992) Complex interactions in metacommunities, with implications for biodiversity and higher levels of selection. Ecology 73:1984–2000
Ylikarjula J, Alaja S, Laakso J, Tesar D (2000) Effects of patch number dispersal patterns on population dynamics and synchrony. J Theor Biol 207:377–387
Zhang F, Hui C, Terblanche JS (2011) An interaction switch predicts the nested architecture of mutualistic networks. Ecol Lett 14:797–803
Zhang FP, Li Z, Zhu G, Li F (2008) Influence of predator pursuit and prey evasion on synchrony in the metacommunity of three trophic food chain. J Lanzhou Univ (Nat Sci) 44(1):36–42
Zhao ZH, Hui C, Ouyang F, Liu JH, Guan XQ, He DH, Ge F (2013) Effects of inter-annual landscape change on interactions between cereal aphids and their natural enemies. Basic Appl Ecol 14:472–479
Zhao ZH, Hui C, Hardev S, Ouyang F, Dong ZK, Ge F (2014) Responses of cereal aphids and their parasitic wasps to landscape complexity. J Econ Entomol 107:630–637
Zhao ZH, Hui C, He DH, Li BL (2015) Effects of agricultural intensification on ability of natural enemies to control aphids. Sci Rep 5:8024
Acknowledgments
This work was supported by the National Natural Science Foundation of China (No. 31200312). C.H. was supported by the National Research Foundation of South Africa (Nos. 89967 and 76912). The authors would also like to Beverley Laniewski for English editing and anonymous referees for their constructive comments.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Liu, Z., Zhang, F. & Hui, C. Density-dependent dispersal complicates spatial synchrony in tri-trophic food chains. Popul Ecol 58, 223–230 (2016). https://doi.org/10.1007/s10144-015-0515-0
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10144-015-0515-0