
Abstract
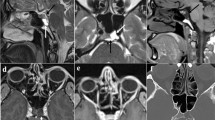
The role of transoral robotic surgery (TORS) in the skull base emerges and represents the natural progression toward miniinvasive resections in confined spaces. The accessibility of the sella via TORS has been recently described on fresh human cadavers. An anatomic study is mandatory to know if this approach would be feasible in the majority of patients regardless of their oral morphological features. From 30 skull base CT scans from patients who were asked to open their mouth as wide as they can, we measured specific dimensions of the oral cavity and the skull base, such as length of the palate, mouth opening and distance from the sella to the palate. All data were acquired on a sagittal midline plane and on a 25° rotation plane, which simulated the axis of the robotic instruments. Looking at the projection of the dental palatine line on the sella, we studied possible predictive factors of sellar accessibility and tried to bring objective data for surgical feasibility. We also proposed an angle α to study the working angle at the skull base. We observed that the maximal mouth opening was a good predictive factor of sellar accessibility by TORS (p < 0.05). The mouth aperture threshold value for a good sensitivity, over 80 %, was comparable to the mean value of mouth opening in our series, 38.9 and 39.4 mm respectively. Moreover, we showed a statistically significant increase of the working angle α at the skull base comparing the lateral access to the midline one (p < 0.05). This seemed to quantitatively demonstrate that the robotic arms placed at the labial commissure of the mouth can reach the sella. From these anatomical features and previous cadaveric dissections, we assume that TORS may be feasible on a majority of patients to remove pituitary adenomas.





Similar content being viewed by others


References
Carrau RL, Jho HD, Ko Y (1996) Transnasal-transsphenoidal endoscopic surgery of the pituitary gland. Laryngoscope 106:914–918
Jho HD, Alfieri A (2001) Endoscopic endonasal pituitary surgery: evolution of surgical technique and equipment in 150 operations. Minim Invasive Neurosurg 44:1–12
Jho HD, Carrau RL (1997) Endoscopic endonasal transsphenoidal surgery: experience with 50 patients. J Neurosurg 87:44–51
Kassam AB, Gardner P, Snyderman C, Mintz A, Carrau R (2005) Expanded endonasal approach: fully endoscopic, completely transnasal approach to the middle third of the clivus, petrous bone, middle cranial fossa, and infratemporal fossa. Neurosurg Focus 19:E6
Kassam AB, Gardner PA, Snyderman CH, Carrau RL, Mintz AH, Prevedello DM (2008) Expanded endonasal approach, a fully endoscopic transnasal approach for the resection of midline suprasellar craniopharyngiomas: a new classification based on the infundibulum. J Neurosurg 108:715–728
Lega BC, Kramer DR, Newman JG, Lee JY (2011) Morphometric measurements of the anterior skull base for endoscopic transoral and transnasal approaches. Skull Base 21:65–70
Stippler M, Gardner PA, Snyderman CH, Carrau RL, Prevedello DM, Kassam AB (2009) Endoscopic endonasal approach for clival chordomas. Neurosurgery 64:268–277
Kaptain GJ, Kanter AS, Hamilton DK, Laws ER (2011) Management and implications of intraoperative cerebrospinal fluid leak in transnasoseptal transsphenoidal microsurgery. Neurosurgery 68:144–150
Mamelak AN, Carmichael J, Bonert VH, Cooper O, Melmed S (2013) Single-surgeon fully endoscopic endonasal transsphenoidal surgery: outcomes in three-hundred consecutive cases. Pituitary 16:393–401
Ceylan S, Koc K, Anik I (2009) Extended endoscopic approaches for midline skull-base lesions. Neurosurg Rev 32:309–319
Advincula AP, Song A (2007) The role of robotic surgery in gynecology. Curr Opin Obstet Gynecol 19:331–336
Baek SK, Carmichael JC, Pigazzi A (2013) Robotic surgery: colon and rectum. Cancer J 19:140–146
Bonatti J, Schachner T, Bonaros N, Lehr EJ, Zimrin D, Griffith B (2011) Robotically assisted totally endoscopic coronary bypass surgery. Circulation 124:236–244
Hakimi AA, Feder M, Ghavamian R (2007) Minimally invasive approaches to prostate cancer: a review of the current literature. Urol J 4:130–137
O’Malley BW Jr, Weinstein GS, Snyder W, Hockstein NG (2006) Transoral robotic surgery (TORS) for base of tongue neoplasms. Laryngoscope 116:1465–1472
Hans S, Badoual C, Gorphe P, Brasnu D (2012) Transoral robotic surgery for head and neck carcinomas. Eur Arch Otorhinolaryngol 269:1979–1984
Chauvet D, Missistrano A, Hivelin M, Carpentier A, Cornu P, Hans S (2014) Transoral robotic-assisted skull base surgery to approach the sella turcica: cadaveric study. Neurosurg Rev 37(4):609–617. doi:10.1007/s10143-014-0553-7
Agrawal A, Cavalcanti DD, Garcia-Gonzalez U, Chang SW, Crawford NR, Sonntag VK, Spetzler RF, Preul MC (2010) Comparison of extraoral and transoral approaches to the craniocervical junction: morphometric and quantitative analysis. World Neurosurg 74:178–188
Hamberger CA, Hammer G, Marcusson G (1961) Experiences in transantrosphenoidal hypophysectomy. Trans Pac Coast Otoophthalmol Soc Annu Meet 42:273–286
O’Malley BW Jr, Weinstein GS (2007) Robotic skull base surgery: preclinical investigations to human clinical applications. Arch Otolaryngol Head Neck Surg 133:1215–1219
Ponnusamy K, Chewning S, Mohr C (2009) Robotic approaches to the posterior spine. Spine (Phila Pa 1976) 34:2104–2109
Lee JY, Lega B, Bhowmick D, Newman JG, O’Malley BW Jr, Weinstein GS, Grady MS, Welch WC (2010) Da Vinci robot-assisted transoral odontoidectomy for basilar invagination. ORL J Otorhinolaryngol Relat Spec 72:91–95
Herrmann BL, Mortsch F, Berg C, Weischer T, Mohr C, Mann K (2011) Acromegaly: a cross-sectional analysis of the oral and maxillofacial pathologies. Exp Clin Endocrinol Diabetes 119:9–14
Güldner C, Pistorius SM, Diogo I, Bien S, Sesterhenn A, Werner JA (2012) Analysis of pneumatization and neurovascular structures of the sphenoid sinus using cone-beam tomography (CBT). Acta Radiol 53:214–219
Acknowledgments
The “Fondation des Gueules Cassées”, the “Société Française de Neurochirurgie-Laboratoire Codman,” and the “Ligue contre le cancer” are acknowledged for the financial funding. The Ecole Européenne de Chirurgie, the Centre du Don des Corps Université Paris Descartes, and Intuitive Surgical—Antoine Missistrano especially—are acknowledged for their assistance. The authors wish to thank the technicians of the Neuradiology Department of La Pitié Salpétrière for their helpful contribution.
Author information
Authors and Affiliations
Corresponding author
Additional information
Comments
Arya Nabavi, Hannover, Germany
The authors thoroughly investigate the da Vinci robotic system, previously reporting a cadaveric study on the feasibility and now a geometric study. In the initial study, a new route to the pituitary was discussed to accommodate the size of the da Vinci robot. In this study, the authors provide mouth opening measurements to select potential patients.
While the theoretical advantages of employing a “robot” are impressive, the surgeon has to be in charge of deciding whether such an assistance system is ready for “prime time”. The studies presented by Dr. Chauvet’s group are important and an absolute prerequisite to this end.
Additionally, the article series opens the issue of reporting on technical novelties. The authors are and should be fascinated by the capability of their new device. Then, the applicability becomes important. Subsequently, safety issues have to be addressed. Apart from additional limitations of the system itself (e.g., tools, anatomy), there has to be a plan “B”: what to do if the system fails during a real surgery? Can the task be completed conventionally by the same approach?
Dr. Chauvet’s group meticulously describes the demands of the current system. This opens our avenue to make the developers understand our needs. Thus, we will be able to advance from describing how we can use an apparatus, which was engineered for different applications, to designing the device we would like to use.
At the end of the day, our challenge is to improve the standard of care for our patients.
Imad N. Kanaan, Riyadh, Kingdom of Saudi Arabia
The authors described a simple method to quantify the feasibility of TORS to sellar region using a prospective well-designed pilot study. The authors enlist their modified exclusion criteria in analyzing CT images of 30 patients using definite anatomical landmarks and statistical values. The direct endonasal transsphenoidal approach to sella reported by HB Griffith et al. in the 1980s reduces several endonasal complications and yields a shorter route; the longer transoral route selected by the authors is compensated by using the robot. The manipulation of surgical instruments in coordination with the dynamic visualization system (endoscope) is an essential prerequisite for a successful endoscopic skull base surgery. The authors should be commended for their effort in preparing a scientific ground to adopt such a nanotechnology innovation to our contemporary neurosurgical practice. Their publication will pave the way for future advance clinical research, innovation, and design of compatible instruments and eventually the potential clinical application of TORAS (transoral robotic-assisted surgery) in neurosurgery. Finally, it is worth to remember that surgery is not an engineered process but a dynamic blend of intelligence, creative art, and skills guided by sound judgment. Robot should not be considered an autonomous system but a tool or “master-slave manipulator” that provides superior visualization, enhance dexterity, precision, ergonomic comfort, with great value in surgical rehearsal, and training of young fellows but requires the full percent human control.
Rights and permissions
About this article

Cite this article
Amelot, A., Trunet, S., Degos, V. et al. Anatomical features of skull base and oral cavity: a pilot study to determine the accessibility of the sella by transoral robotic-assisted surgery. Neurosurg Rev 38, 723–730 (2015). https://doi.org/10.1007/s10143-015-0635-1
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10143-015-0635-1