
Abstract
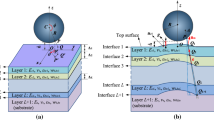
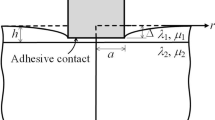
Thin films, coatings, and layered structures are ubiquitous in contemporary micro- and nanoelectronics, optoelectronics, and electromechanical systems, for which adhesion between heterogeneous materials is one of the important mechanical properties to be considered in fabrication and operation. In this study, the adhesive contact between elastic layered spheres, which includes a thin film on a flat substrate as a special case, is analyzed on the basis of the conventional Johnson–Kendall–Roberts (JKR) theory on adhesive contact between elastic spheres. Firstly, the force–depth relations of axisymmetric flat and spherical indentations on an elastic film perfectly bonded to an elastic half-space are obtained in compact forms, depending on two Dundurs parameters and the ratio of the contact radius to the thickness of the film. The solution of a spherical indentation on a layered half-space is then superposed, following a Hertz analysis, to obtain the adhesionless Hertzian contact between the elastic films coated on the elastic spheres. Similarly, the solution to the adhesive JKR contact state between elastic films coated on elastic spheres is also obtained by properly superposing the linear elastic solutions of the flat and spherical indentations on a layered half-space. The obtained Hertzian and adhesive JKR contact states should be regarded as approximate solutions, since the pressure distribution in the contact region does not exactly satisfy Newton’s third law. The JKR state equations among the normalized applied force, normalized penetration depth, and normalized contact radius are obtained in compact forms, in which non-dimensional multiplying factors depending on the geometric parameters and two sets of non-dimensional Dundurs parameters account for the effect of the elastic layers. Finally, the pull-off force at the moment of debonding of the two elastic films coated on the elastic spheres is calculated and compared with the conventional JKR result.













Similar content being viewed by others
References
Hertz, H.: Ueber die Berührung fester elastischer Körper. Journal fur die Reine und Angewandte Mathematik 92, 156–171 (1882)
Maboudian, R.: Surface processes in MEMS technology. Surf. Sci. Rep. 30(6), 207–269 (1998). https://doi.org/10.1016/S0167-5729(97)00014-9
Zhao, Y.P., Wang, L.S., Yu, T.X.: Mechanics of adhesion in MEMS—a review. J. Adhes. Sci. Technol. 17(4), 519–546 (2003). https://doi.org/10.1163/15685610360554393
Kim, K.-S., Kim, J.-H., Lee, H.-J., Lee, S.-R.: Tribology issues in nanoimprint lithography. J. Mech. Sci. Technol. 24(1), 5–12 (2010). https://doi.org/10.1007/s12206-009-1216-4
Johnson, K.L., Kendall, K., Roberts, A.D., Tabor, D.: Surface energy and the contact of elastic solids. Proc. R. Soc. Lond. A Math. Phys. Sci. 324(1558), 301–313 (1971). https://doi.org/10.1098/rspa.1971.0141
Derjaguin, B.V., Muller, V.M., Toporov, Y.P.: Effect of contact deformations on the adhesion of particles. J. Colloid Interface Sci. 53(2), 314–326 (1975). https://doi.org/10.1016/0021-9797(75)90018-1
Tabor, D.: Surface forces and surface interactions. J. Colloid Interface Sci. 58(1), 2–13 (1977). https://doi.org/10.1016/0021-9797(77)90366-6
Maugis, D.: Adhesion of spheres: the JKR-DMT transition using a Dugdale model. J. Colloid Interface Sci. 150(1), 243–269 (1992). https://doi.org/10.1016/0021-9797(92)90285-T
Johnson, K.L., Greenwood, J.A.: An adhesion map for the contact of elastic spheres. J. Colloid Interface Sci. 192(2), 326–333 (1997). https://doi.org/10.1006/jcis.1997.4984
Maugis, D.: Contact, Adhesion and Rupture of Elastic Solids. Springer Series in Solid-State Sciences, New York (2000)
Barthel, E.: Adhesive elastic contacts: JKR and more. J. Phys. D Appl. Phys. 41(16), 163001 (2008). https://doi.org/10.1088/0022-3727/41/16/163001
Sridhar, I., Johnson, K.L., Fleck, N.A.: Adhesion mechanics of the surface force apparatus. J. Phys. D Appl. Phys. 30(12), 1710–1719 (1997). https://doi.org/10.1088/0022-3727/30/12/004
Johnson, K.L., Sridhar, I.: Adhesion between a spherical indenter and an elastic solid with a compliant elastic coating. J. Phys. D Appl. Phys. 34(5), 683–689 (2001). https://doi.org/10.1088/0022-3727/34/5/304
Sridhar, I., Zheng, Z.W., Johnson, K.L.: A detailed analysis of adhesion mechanics between a compliant elastic coating and a spherical probe. J. Phys. D Appl. Phys. 37(20), 2886–2895 (2004). https://doi.org/10.1088/0022-3727/37/20/016
Mary, P., Chateauminois, A., Fretigny, C.: Deformation of elastic coatings in adhesive contacts with spherical probes. J. Phys. D Appl. Phys. 39(16), 3665–3673 (2006). https://doi.org/10.1088/0022-3727/39/16/021
Barthel, E., Perriot, A.: Adhesive contact to a coated elastic substrate. J. Phys. D Appl. Phys. 40(4), 1059–1067 (2007). https://doi.org/10.1088/0022-3727/40/4/021
Lebedev, N.N., Ufliand, I.S.: Axisymmetric contact problem for an elastic layer. J. Appl. Math. Mech. 22(3), 442–450 (1958). https://doi.org/10.1016/0021-8928(58)90059-5
Dhaliwal, R.S.: Punch problem for an elastic layer overlying an elastic foundation. Int. J. Eng. Sci. 8(4), 273–288 (1970). https://doi.org/10.1016/0020-7225(70)90058-3
Hayes, W.C., Keer, L.M., Herrmann, G., Mockros, L.F.: A mathematical analysis for indentation tests of articular cartilage. J. Biomech. 5(5), 541–551 (1972). https://doi.org/10.1016/0021-9290(72)90010-3
King, R.B.: Elastic analysis of some punch problems for a layered medium. Int. J. Solids Struct. 23(12), 1657–1664 (1987). https://doi.org/10.1016/0020-7683(87)90116-8
Yu, H.Y., Sanday, S.C., Rath, B.B.: The effect of substrate on the elastic properties of films determined by the indentation test—axisymmetric Boussinesq problem. J. Mech. Phys. Solids 38(6), 745–764 (1990). https://doi.org/10.1016/0022-5096(90)90038-6
Yang, F.: Indentation of an incompressible elastic film. Mech. Mater. 30(4), 275–286 (1998). https://doi.org/10.1016/S0167-6636(98)00035-0
Yang, F.: Thickness effect on the indentation of an elastic layer. Mater. Sci. Eng. A 358(1), 226–232 (2003). https://doi.org/10.1016/S0921-5093(03)00289-2
Sergici, A.O., Adams, G.G., Müftü, S.: Adhesion in the contact of a spherical indenter with a layered elastic half-space. J. Mech. Phys. Solids 54(9), 1843–1861 (2006). https://doi.org/10.1016/j.jmps.2006.03.005
Constantinescu, A., Korsunsky, A.M., Pison, O., Oueslati, A.: Symbolic and numerical solution of the axisymmetric indentation problem for a multilayered elastic coating. Int. J. Solids Struct. 50(18), 2798–2807 (2013). https://doi.org/10.1016/j.ijsolstr.2013.04.017
Stan, G., Adams, G.G.: Adhesive contact between a rigid spherical indenter and an elastic multi-layer coated substrate. Int. J. Solids Struct. 87, 1–10 (2016). https://doi.org/10.1016/j.ijsolstr.2016.02.043
Argatov, I.I., Borodich, F.M., Popov, V.L.: JKR adhesive contact for a transversely isotropic layer of finite thickness. J. Phys. D Appl. Phys. 49(4), 045307 (2015). https://doi.org/10.1088/0022-3727/49/4/045307
Choi, S.T.: Extended JKR theory on adhesive contact of a spherical tip onto a film on a substrate. J. Mater. Res. 27(1), 113–120 (2012). https://doi.org/10.1557/jmr.2011.324
Sohn, D., Won, H.-S., Jang, B., Kim, J.-H., Lee, H.-J., Choi, S.T.: Extended JKR theory on adhesive contact between elastic coatings on rigid cylinders under plane strain. Int. J. Solids Struct. 71, 244–254 (2015). https://doi.org/10.1016/j.ijsolstr.2015.06.026
Dundurs, J.: Elastic interaction of dislocations with inhomogeneities. In: Mura, T. (ed.) Mathematical Theory of Dislocations, pp. 70–115. ASME, New York (1969)
Gladwell, G.M.L.: Contact Problems in the Classical Theory of Elasticity. Sijthoff & Noordhoff International Publishers, Netherlands (1980)
Sneddon, I.N.: The relation between load and penetration in the axisymmetric Boussinesq problem for a punch of arbitrary profile. Int. J. Eng. Sci. 3(1), 47–57 (1965). https://doi.org/10.1016/0020-7225(65)90019-4
Maugis, D., Barquins, M.: Fracture mechanics and the adherence of viscoelastic bodies. J. Phys. D Appl. Phys. 11(14), 1989–2023 (1978). https://doi.org/10.1088/0022-3727/11/14/011
Acknowledgements
This research was supported by the National Research Foundation of Korea (NRF) grant funded by the Korea government (Ministry of Science and ICT) (No. NRF-2017R1A2B4012081) and the Nano-Material Technology Development Program by NRF, funded by the Korea government (Ministry of Science and ICT) (No. NRF-2016M3A7B4910531).
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Appendix: Solution procedure of the axisymmetric indentation problem
Appendix: Solution procedure of the axisymmetric indentation problem
In order to solve the indentation problem defined in Sect. 2.1, the same solution procedure as that used by Lebedev and Ufliand [17] is adopted here. The Hankel transform and its inverse transform of the order \(\rho \), defined as
respectively, are used, where \(J^{[\rho ]}(\lambda r)\) is the \(\rho \)th-order Bessel function of the first kind. Before proceeding to the solution procedure, every quantity of the length dimension is normalized by the radius a of the indenter tip, and the tilt \(({}^{\sim })\) is adopted to indicate the non-dimensionalized quantity, e.g., \(\tilde{r}=r/a\) and \(\tilde{z}=z/a\). Using the Hankel transform of the first order on \(\tilde{u}(\tilde{r},\tilde{z})\) and the zero order on \(\tilde{w}(\tilde{r},\tilde{z})\) and \(\varepsilon (\tilde{r},\tilde{z})\), we transform Eqs. (1)–(4) as follows:
The above system of linear second-order ordinary differential equations has a general solution of the following form:
where \(\kappa =3-4\nu \) and the unknown coefficients, \(A_a (\lambda )\), \(A_b (\lambda )\), \(A_c (\lambda )\), \(B_a (\lambda )\), \(B_b (\lambda )\), and \(B_c (\lambda )\) should be determined based on the prescribed boundary conditions. The stresses \(\sigma ^{rz}(\tilde{r},\tilde{z})\) and \(\sigma ^{zz}(\tilde{r},\tilde{z})\) are expressed in terms of the Hankel-transformed variables \(U^{[1]}(\lambda ,\tilde{z})\), \(W^{[0]}(\lambda ,\tilde{z})\), and \(E^{[0]}(\lambda ,\tilde{z})\) as
By applying the Hankel transform to Eqs. (5)–(7) and using Eqs. (6) and (A.10) together with Eqs. (A.7) and (A.8), we obtain
By applying the inverse Hankel transform to Eq. (A.8) with Eqs. (A.12)–(A.14) and substituting it in the first relation of Eq. (5), we obtain
in which \(D(\lambda )=-\lambda \left[ {B_a (\lambda )+B_b (\lambda )} \right] \). In addition, on substituting Eqs. (A.11)–(A.14) in the second relation of Eq. (5), we obtain
where
The solution \(D(\lambda )\) of the dual integral Eqs. (A.15) and (A.16) is sought in the form
where \(\varphi (t)\) is an unknown function; this function and its derivative are continuous in the closed interval [0, 1]. The integral equation (A.16) is then identically satisfied, and integral equation (A.15) can be rewritten as the following Fredholm integral equation of the second kind:
in which \(G_F (t)\) is the Fourier cosine transform of \(G(\lambda )\), which is defined as
and
The integral equation (A.19) for \(\varphi (s)\) can be numerically solved for a given shape of the axisymmetric tip, i.e., the given shape function \(\tilde{\psi }(r)\).
For a rigid flat tip, \(\tilde{\psi }(r)=0\). Thus, the integral equation (A.19) with \(\varPsi (s)=1\) can be solved for \(\varphi (s)\), the solution of which is designated by \(\varphi _f (s)\). For a rigid spherical tip, \(\tilde{\psi }(r)={\tilde{r}^{2}}/{2\tilde{R}}\), where R is the radius of the spherical tip, and thus, \(\varPsi (s)=1-{s^{2}}/{\tilde{\delta }\tilde{R}}\). The solution of the integral equation (A.19) can then be expressed as
Here, \(\varphi _f (s)\) is the solution for a flat tip, i.e., the solution to integral equation (A.19) with \(\varPsi (s)=1\), and \(\varphi _q (s)\) satisfies
The continuity condition for the normal stress at the boundary of the contact area imposes a constraint on the solution given by Eq. (A.22) [19]:
which provides the relation between the indentation depth \(\delta \) and radius a of the contact area for a spherical indentation.
Rights and permissions
About this article

Cite this article
Nguyen, V.P., Choi, S.T. Extended JKR theory on adhesive contact of coated spheres. Acta Mech 230, 4213–4233 (2019). https://doi.org/10.1007/s00707-019-02499-4
Received:
Revised:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00707-019-02499-4