
Abstract
Shielded tunnel boring machines (TBMs) can get stuck in squeezing ground due to excessive tunnel convergence under high in situ stress. This typically coincides with extended machine stoppages, when the ground has sufficient time to undergo substantial displacements. Excessive convergence of the ground beyond the designated overboring means ground pressure against the shield and high shield frictional resistance that, in some cases, cannot be overcome by the TBM thrust system. This leads to machine entrapment in the ground, which causes significant delays and requires labor-intensive and risky operations of manual excavation to release the machine. To evaluate the impact of the time factor on the possibility of machine entrapment, a comprehensive 3D finite difference simulation of a double-shielded TBM in squeezing ground was performed. The modeling allowed for observation of the impact of the tunnel advance rate on the possibility of machine entrapment in squeezing ground. For this purpose, the model included rock mass properties related to creep in severe squeezing conditions. This paper offers an overview of the modeling results for a given set of rock mass and TBM parameters, as well as lining characteristics, including the magnitude of displacement and contact forces on shields and ground pressure on segmental lining versus time for different advance rates.
Similar content being viewed by others

1 Introduction
Tunnel excavation by a shielded tunnel boring machine (TBM) is a cyclic process between mining and lining installation or regripping, but, relative to the gradual movement of the ground, it can be considered as a continuous movement of the face. This is true unless a major delay, such as long holidays, weekends, and extended repair or maintenance stoppages, and other issues during operation are experienced. The entrapment of shielded TBMs can occur in squeezing ground due to excessive tunnel convergence during such extended stoppages. This shows the importance of the “time” factor in tunneling operations, which should be considered for evaluating the stability conditions and designing the support system due to the considerable amount of deformation and contact pressure which may develop over time (Ramoni and Anagnostou 2010).
There are many cases of shielded TBMs being trapped in the ground when there was a slowdown in operation or a standstill in the TBM drive. The Nuovo Canale Val Viola (Italy, double-shielded TBM, D = 3.60 m) (Ramoni and Anagnostou 2010), the Ghomroud Tunnel (Iran, double-shielded TBM, D = 4.50 m) (Farrokh and Rostami 2009), and the Yindaruqin Irrigation Project (China, double-shielded TBM, D = 5.54 m) (Ramoni and Anagnostou 2010) are examples of cases where the TBM became trapped in squeezing ground during a 1-week holiday stop or during an extended maintenance stop. This suggests that maintaining a high daily advance rate and reducing downtime may have a positive effect in avoiding TBM entrapment (Ramoni and Anagnostou 2010).
Standstills are unfavorable also with respect to cutterhead operation. Depending on the ground rheological behavior, high ground pressures acting against the cutterhead or an extremely high extrusion rate of the core may develop. In this respect, the Gilgel Gibe II Tunnel (Ethiopia, double-shielded TBM, D = 6.98 m) is a case history that can be used as an example (Barla 2010; Ramoni and Anagnostou 2010). Furthermore, an open-face TBM was also reported to be trapped in the Yacambú-Quibor Tunnel in Perù. The tunnel was excavated in silicified and graphitic phyllites with creep behavior and bored at depths of up to 1,270 m below the surface, and extreme squeezing problems were encountered. In this project, delay in excavation because of holidays and maintenance of the machine led to machine entrapment and loss of the TBM (Hoek and Guevara 2009).
As stated by the International Society for Rock Mechanics (ISRM), squeezing behavior is the time-dependent large deformation related to the progressive yielding, which occurs around the tunnel and is essentially associated with creep, caused by exceeding a threshold shear stress. Deformation may terminate during construction or continue over a long period of time (Barla 2001). In engineering practice, the difficulties in dealing with squeezing conditions are connected to: (1) the evaluation of the time-dependent characteristics of the rock mass by means of laboratory or in situ tests, (2) the use of an appropriate constitutive model, and (3) the choice of a suitable excavation and support system (Debernardi and Barla 2009; Barla et al. 2010).
For the design of mechanized tunneling in squeezing conditions, the complex interaction between the rock mass, the tunnel machine, its system components, and the tunnel support has to be analyzed in detail and 3D models including all of these components are better suited to correctly simulate this interplay and avoid the errors introduced with the assumption of plane strain conditions (Cantieni and Anagnostou 2009). It is noted that axisymmetric models can also be used to avoid such errors, as described by Ramoni and Anagnostou (2010).
There are many studies in the literature that are related to the numerical analyses of mechanized tunneling in squeezing conditions. As reported by Ramoni and Anagnostou (2011a, b), Lombardi (1981) presented the first results of 3D numerical modeling and investigated the impact of the advance rate on the lining loading for the simplified model of a lining that starts to become loaded 40 m behind the face. Furthermore, Lombardi and Panciera (1997) utilized numerical analyses to evaluate the feasibility of a double-shielded TBM drive for the Guadiaro-Majaceite Tunnel (Spain, D = 4.88 m). The model incorporates advance rate and time-dependent ground behavior in the simulations, but the analysis was not fully 3D and did not consider the interactions between the rock mass and the TBM components.
Similar numerical studies were performed by Shalabi (2005), who carried out a back analysis of the creep deformations and pressures of the Stillwater Tunnel (USA, D = 3.06 m) by assuming the tunnel as being lined up to the face. The developed model did not consider the shield in the numerical computations. In addition, Amberg (2009) and Lombardi et al. (2009) simulated the shield by applying a support pressure of 1 MPa at the face and at the excavation boundary around the shield. Their model analyzed the impact of the advance drainage on the ground behavior for the excavation of the service tunnel of the planned Gibraltar Strait Tunnel between Morocco and Spain (D = 6.50 m).
Numerical studies that evaluate the stresses and deformations of the shield structure of the single-shielded TBM of the Hallandsås Tunnel (Sweden, D = 10.70 m) were performed by Wittke et al. (2007). The analysis considers seepage flow, but the shield is modeled by introducing the a priori assumption that the ground closes the steering gap at a distance of 4 m behind the working face.
Ramoni and Anagnostou (2006) employed axisymmetric numerical models in order to investigate the effects of thrust force, overboring, shield length, and skin friction coefficient between the shield and the ground with respect to the problem of shield jamming. Ramoni and Anagnostou (2007, 2008) created the model by implementing the stress-point algorithm in accordance with the so-called “steady state method”, a numerical procedure for solving problems with constant conditions in the tunneling direction by considering a reference frame, which is fixed to the advancing tunnel face. A recent description of the computational method and numerical comparisons with the step-by-step simulation of an advancing tunnel can be found in Cantieni and Anagnostou (2009).
Fully 3D numerical simulations of shielded TBMs have been presented by Graziani et al. (2007), Sterpi and Gioda (2007), Schmitt (2009), Pellet et al. (2009), Einstein and Bobet (1997), Ramoni and Anagnostou (2007), and Zhao et al. (2012). The model developed by Graziani et al. (2007) was a 3D model that considered creep effects for the planned Brenner Base Tunnel (Austria, double-shielded TBM, D = 11.00 m). Time effects were also taken into account by Sterpi and Gioda (2007), who highlighted the fundamental effect of creep, as well as by Einstein and Bobet (1997) and Ramoni and Anagnostou (2007), who studied the consolidation processes associated with the development and subsequent dissipation of excess pore pressures around the tunnel in a low-permeability water-bearing ground.
A recent description of the “steady state method” (including its further development for poro-elasto-plastic materials) and numerical comparisons with the step-by-step simulation of an advancing tunnel can be found in Cantieni and Anagnostou (2009). Step-by-step simulations of tunnel excavation have also been performed by Schmitt (2009), who studied the behavior of single-shielded TBMs. The model offers valuable insights into the effects of non-uniform convergence and of non-hydrostatic shield and lining loading.
As a follow-up of the work above, this paper is intended to describe a comprehensive 3D model of a shielded TBM which has been developed with the FLAC3D code (Itasca FLAC3D Manual 2006), so that all the properties of the main TBM components can be used as variables at each step of the analysis. The 3D model has the advantages of numerical analysis and the ability to model complex ground behavior, without the disadvantages of interjected inaccuracies of modeling the tunneling process in 2D models, including the limitation of the axisymmetric models.
The numerical modeling discussed builds upon the computational model of Zhao et al. (2012) and Hasanpour et al. (2014) by taking creep into consideration. Furthermore, the 3D modeling uses finite difference analysis with the capability to allow for large strains in the numerical computation. Also, the analysis is based on simple and accurate configurations of the shield components that are used in practice.
The finite difference models can be applied in various rock mass conditions, including hard, weak, and intermediate rock masses. In addition, different shield types and correct dimensions of the shield components can be modeled by small changes in the input data. The effects of backfilling materials can also be taken into account by considering the geometry of the tunnel and machine, as well as time-dependent properties of the backfill grout.
Various TBM configurations can be simulated with respect to the type of TBM only by changing the values assigned to each component. For example, a single-shielded TBM can be simulated by modeling one part of the shield and changing the grouting material properties. Elimination of the shield elements by advancing the face and relocation of the shield can be used to simulate machine advance in the tunnel and extrusion of the segments from the tail shield (Hasanpour et al. 2014).
The contact between the shield and rock mass has been modeled by using interface elements on both tunnel and shield boundaries. This is accomplished while considering the gap between the ground and the shield by accounting for a non-uniform overcut around the shielded TBM. However, given that the numerical formulation used is based on the large strain assumption, for preventing the penetration of the rock mass into the shield elements due to large displacements in squeezing ground, an algorithm was used to control the ground displacement at the contact surfaces. For this purpose, a FISH code was developed in FLAC3D that monitors all displacements with respect to non-uniform overcut at each solving step of the numerical analysis.
The increase of the gap due to the conical shape of the shield (stepwise reduction of the diameter of the rear shield in comparison to the front shield) is considered. This property distinguishes the model from other 3D models that have been developed for the numerical simulation of shielded TBMs in the past (Hasanpour et al. 2014). Moreover, the model developed for this study is capable of using Mohr–Coulomb or Hoek–Brown failure criteria as input data depending on field measurements and ground conditions.
This paper will also offer an overview of the issues related to the creep behavior of rock with an emphasis on the Burger-creep visco-plastic model (CVISC model), as available in the FLAC3D code. This is followed by a discussion on the modeling procedure implemented in order to simulate the tunneling operation using a double-shielded TBM.
The results obtained show that modeling can be used to estimate tunnel convergence during TBM excavation, compare the longitudinal and sectional ground pressures for different advance rates, and predict the magnitude of the contact forces on the shields in squeezing conditions, so as to estimate the frictional force between the rock and the shield and, thus, the required machine thrust to move the machine forward.
2 Creep Behavior
Creep is a time-dependent deformation that may occur in materials under constant stress. Creep originates from visco-elastic effects in the solid framework; thus, creep, unlike consolidation, may occur in both dry and saturated rock conditions. There are three stages of creep following a change in the stress state.
First, there is a region where the rate of the time-dependent deformation decreases with time. This is called transient (or primary) creep. The process may be associated with minor spreading at the decaying rate of “stable” microfractures. If the applied stress is reduced to zero during the primary creep stage, the deformation will eventually decrease to zero (Fig. 1a) (Fjaer et al. 2008).

a Strain versus time for a creeping material. b The development of creep for different values of the applied stress (Fjaer et al. 2008)
In the next stage, the deformation rate is constant. This is called steady state (or secondary) creep. If the applied stress is reduced to zero during this stage, the deformation will not vanish completely. Steady-state creep thus implies a permanent deformation of the material.
Finally, the deformation rate may increase with time. This is called accelerating (or tertiary) creep. This stage leads to rapid change in the deformation rate, and, ultimately, to failure. The process may be associated with a rapid spreading of “unstable” fractures (Fjaer et al. 2008).
The actual creep behavior of rock depends on the magnitude of the applied stress. For low or moderate stresses, the material may virtually stabilize after a period of transient creep. For high stresses, the material may rapidly run through all three stages of creep and, finally, fail. The intermediate stress regime, where the material fully develops each stage of creep, may be small and hard to find in practice (Fig. 1b).
The time scale of a creep stage may vary over a wide range: in some cases, it lasts for minutes, in other cases for years. Creep is a molecular process, and the time scale depends on temperature; the process generally speeds up with increasing temperature (Farmer 1983). The fact that even steady-state creep eventually leads to failure means that a rock which is loaded to a level somewhat below its ultimate strength may fail after some time, if the load is maintained. This effectively reduces the long-term uniaxial strength to typically 50–70 % of the ultimate strength (Farmer 1983).
The CVISC model as available in FLAC3D has been used in this paper to simulate the time-dependent behavior. CVISC is an analogical model which couples, in series, the Burger visco-elastic model (i.e., Kelvin and Maxwell models in series) with a plastic flow rule, based on the Mohr–Coulomb yield criterion. The CVISC model is characterized by a visco-elasto-plastic deviatoric behavior and an elasto-plastic volumetric behavior.
The deviatoric and volumetric behavior are schematically illustrated in Fig. 2, where a Kelvin unit characterized by its shear modulus G K and viscosity η K, a Maxwell unit characterized by its shear modulus G M and viscosity η M, and a Mohr–Coulomb plastic unit characterized by its cohesion c, friction angle ϕ, and dilation angle ψ are connected in series and subjected to a certain deviatoric loading jointly.

Schematical representation of the Burger-creep visco-plastic model (CVISC) model: a deviatoric behavior and b volumetric behavior (Bonini et al. 2009)
In this model, the visco-elastic strains are deviatoric and depend only on the deviatoric stress S i,j ; instead, the plastic strains are both deviatoric and volumetric and depend on σ ij in accordance with the chosen flow rule (Bonini et al. 2009).
3 Numerical Model
In order to simulate a mechanized tunneling process by a double-shielded TBM, various 3D models were developed in FLAC3D. A parametric study was carried out to determine the required distance from the tunnel face to the edge of the final segmental ring to prevent the edge effect on displacement and stress magnitudes of the numerical model in the advancing direction of the tunnel. The initial results indicated that a distance larger than 2.5 times the tunnel diameter to the face (in hard rock) and larger than 4 times the tunnel diameter (in weak rock) is necessary to prevent edge effects (Hasanpour et al. 2014).
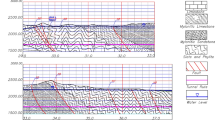
The 3D block model and relevant dimensions were selected and implemented based on the Lyon–Turin Base Tunnel data (Barla et al. 2010; Bonini and Barla 2012), as shown in Fig. 3a. The screenshot shows a cross-section of the 3D isometric view of the model, where the horizontal (x), longitudinal (y), and vertical (z) directions are 75, 100, and 150 m, respectively. The 3D model comprises a total of 87,000 elements and 88,236 nodes. The model is very finely discretized near the excavation perimeter and within the lining. The tunnel is assumed to be in squeezing rock with characteristics back-calculated from the observed behavior of the ground based on field measurements.

Figure 3b shows the schematic view of the simulated double-shielded TBM arrangement to reflect the true geometry of the machine and reduced shield diameter in stages, and also to represent the eccentric overcut in the tunnel, with maximum overcut at the crown. The double-shielded TBM arrangement used in the simulation was taken from the study by Zhao et al. (2012). However, the excavation diameter was modified and applied in accordance with the studies performed on the Saint Martin La Porte access adit along the Lyon–Turin Base Tunnel (Barla et al. 2010).
The discretization of the numerical model is shown in Fig. 4. Additionally, Table 1 contains the main specifications of the double-shielded TBM used in the model. The shield, segmental lining, and annular gap backfill were considered to behave as linearly elastic material, with the pertinent properties listed in Table 2. In the modeling of the shield skin, the total weight of the TBM was applied by a normal stress to the lower 45° area of the shield which was in contact with the tunnel floor. The thrust force was applied to the excavation face by using an equivalent normal stress.

Numerical model for the simulation of tunneling with a double-shielded TBM: a complete model and b description of the model (Hasanpour et al. 2014)
It is noted that the design of the double shield considered in this study is not the standard design for double-shielded TBMs. The shield geometry is a special solution for TBM tunneling in squeezing ground, based on the modified design after Concilia and Grandori (2004), as reported in Ramoni and Anagnostou (2010).
In this study, the contact between the cutterhead and the rock mass, as well as the contact between the shields and the rock mass, has been modeled by using interface elements on both the tunnel and shield boundaries, and by considering the gap between these components according to a non-uniform overcut in the shielded TBM. Cross-sections of the front shield and the rear shield are illustrated in Fig. 5. Normal, shear, and tensile stiffness values (k n, k s, and k t, respectively) were assigned to the interface elements for the simulation of the interaction between the shield and the excavation surroundings (and also between the segmental lining and the backfill).

Cross-section of a double-shielded TBM at the front shield and the rear shield to reflect the true geometry of the shield and overcut (Zhao et al. 2012)
It is noted that the use of very high stiffness values for interface elements in FLAC3D could lead to very slow response and solution convergence, and produce numerical errors related to the computer’s precision. A good rule of thumb is that k n and k s should be selected to be ten times the equivalent stiffness of the softer neighboring zone, which is given by:
where K and G are the bulk and shear moduli, respectively, and ΔZ min is the smallest width of an adjacent zone in the normal direction.
It should be reminded that, since there is a difference in zone density between two adjacent grids (shield and rock mass), the interface should be attached to the grid with the greater density. Also, the size of the interface elements should always be equal to or smaller than the target faces with which they are expected to come into contact. If this requirement is not met in discretization, the interface elements should be subdivided into smaller elements. On the other hand, interface elements should be limited to grid surfaces that will actually come into contact with another grid (Itasca FLAC3D Manual 2006).
The numerical formulation used in this study is based on the large strain assumption, but, sometimes, unforeseen errors such as the penetration of rock mass into shield elements occurred during the numerical calculations. Therefore, to avoid the problems related to large displacements in squeezing ground, the method of displacement control has been applied to contact surfaces. For this purpose, a FISH code was developed in FLAC3D to monitor and control all displacements with respect to non-uniform overcut at each solving step of the numerical analysis (Hasanpour et al. 2014).
This means that, when contact between the ground and shields takes place, the code stops the displacement of the interface elements for each solving step. Therefore, it prevents penetration of the ground into the shield that leads to unforeseen runtime errors. Increasing of the gap due to the conical shape of the shield is considered in the code as part of the longitudinal profile of the double-shielded TBM.
4 Modeling the Excavation Process
The excavation stages were simulated based on the construction design of the cutterhead, front shield, and rear shield for a double-shielded TBM. The total number of solving steps was set up based on the operational mode of the TBM in squeezing ground with respect to the machine advance rate. A total of 31 excavation steps were simulated, consisting of the initial undisturbed ground step and 30 excavation steps (each excavation step was to be 1 m in length). As illustrated in Fig. 5, 30 steps are sufficient in order to avoid boundary effects. Moreover, 15 steps are necessary to build up the computational model. On the other hand, due to the short-term analysis performed, the final value of the ground pressure is not reached at the end of the calculations.
For creep runs, a time step in the computer code represents real time, while in static analyses, the time step is used as a virtual value for stepping the steady-state condition. For creep simulation in FLAC, a time step depends on the TBM advance rate. Furthermore, FLAC allows the user to adopt a time step for time-dependent phenomena such as creep analysis. The constitutive laws for creep make use of the time step in the equations, so the time step may affect the response. For the CVISC model, the maximum creep time step is calculated as follows:
where the superscripts K and M refer respectively to Kelvin and Maxwell properties.
In the numerical analysis for tunneling with a double-shielded TBM, each solving time step has been adjusted according to the advance rates. For example, when the advance rate is 12 m/day, for 1 m of excavation (which is equal to one step), 2 h elapsed. Therefore, the solving step or iteration time is adjusted for 2 h or 120 min. The units of creep parameters such as viscosities change from MPa-year to MPa-min to coordinate with each other.
The modeling excavation stages are defined as follows (Fig. 6):
-
1.
In the first stage, the initial in situ stresses are implemented and the correct distribution of stresses is applied to the rock mass model.
-
2.
In the second stage, tunnel boring starts excavating into the face by making a circular shape impression into it; the cutterhead is activated, the thrust force and TBM weight are applied to the tunnel face and invert, respectively, and are maintained for all stages of excavation. The contact analysis between the cutterhead and tunnel face is performed in this stage. The maximum cutterhead thrust force has been set to 11 MN for the given machine size and ground properties.
-
3.
In the third stage, the front shield moves forward. Numerical results are examined for the evaluation of probable contact between the ground and the front shield. Also, the entrapment risks are analyzed when contact occurs between the walls and the shield.
-
4.
In the fourth stage, the rear shield is activated by considering its length. The analysis of the numerical results for this stage is the same as that for the third stage.
-
5.
In the fifth stage, installation of the segmental linings is implemented inside the rear shield.
-
6.
In the sixth stage, the segmental ring is subjected to ground loading; this is assumed to start from the third segment behind the machine. Moreover, the injection of backfill into the annular space between the rock mass and lining by using the soft grout is applied. This also allows for the simulation of injecting pea gravel.
-
7.
In the seventh stage, hardening of the backfill in the annular space is activated.

Double-shielded TBM tunneling. Stages of numerical simulation
The model is set up such that, when a segmental ring is extruded from the tail shield, the material property of the rear shield is replaced by the material property of the soft filling for the annular space in the area of the first two segmental rings. It should also be noted that, in modeling the lining, the joints between segments and adjacent rings are not considered, and the ring is modeled as a thick wall cylinder.
5 Modeling the Ground Time-Dependent Behavior
The in situ stresses are taken to vary linearly with depth, and the tunnel is assumed to be at a depth of nearly 600 m. The ratio between the horizontal and vertical stress components (K 0 = σ h/σ v) in the ground is assumed to be equal to 1. The rock mass is to follow an elastic perfectly plastic behavior according to the Mohr–Coulomb failure criterion, with the parameters as summarized in Table 3.
The CVISC model is applied for describing the tunnel time-dependent response associated with severely squeezing conditions. The creep parameters of the CVISC model were derived from Barla et al. (2010). Table 4 summarizes the creep parameters.
6 Results of the Numerical Analysis
The results of the numerical analysis include the contact forces between the ground and the machine components, as well as the history of the principal stresses in the ground, for different advance rates. Consideration is given in the following to a non-uniform gap between the shields and the bored tunnel walls.
6.1 Double-Shielded TBM Time-Dependent Excavation
Figure 7 shows the longitudinal displacement profile (LDP) and the longitudinal contact force profile (LCFP) at the tunnel crown based on the CVISC model. The TBM advance rate (AR) is taken to be equal to 12 m/day. As illustrated in the figure, the gap between the front shield and ground is closed at the end of the shield, behind the cutterhead, as the ground gradually converges and comes into contact with the machine along the shield. The closure of the gap between the front shield and the ground occurs approximately 4.0 m behind the face, and the ground starts to load the front shield with a magnitude of up to 6.8 MN.

Longitudinal displacement profile (LDP) at the tunnel boundary and longitudinal contact force profile (LCFP) on the shields at the crown along the tunnel for an advance rate (AR) = 12 m/day
Due to the conical shape of the shields, the contact stress between the ground and the rear shield is initially zero. Then, the ground comes into contact with the rear shield at a distance of 9 m from the face and loads it up to 4.7 MN. It is noted that the load values become maximum at one location (for example, in Fig. 7, the loads are calculated above the front shield and along the tunnel crown, or in a 12 o’clock position). The contact forces at any point are calculated based on the estimated contact pressure from the ground for an increment of 1 m at the given point (1 m is one excavation step).
The corresponding longitudinal ground pressure profile (LPP) at the tunnel crown is illustrated in Fig. 8. For this purpose, an area between 11 and 1 o’clock along the tunnel crown is selected. A stress redistribution due to tunnel excavation occurs and the ground pressure decreases from the in situ stress value of 13.8 to 0.2 MPa in the area of the front shield. When contact between the front shield and the tunnel wall starts, the shield is shown to support the ground. With the tunnel face advance, the ground pressure increases up to 3.1 MPa.

Longitudinal ground pressure profile (LPP) at the tunnel crown for AR = 12 m/day
Due to the conical shape of the rear shield (a stepwise reduction in the shield diameter is assumed), the ground pressure decreases to below 0.2 MPa behind the front shield. Contact between the rear shield and the ground takes place with the advancing of the tunnel face, and the ground pressure at the crown increases to 2.7 MPa. The installation of the segmental lining and the subsequent application of backfilling allows for contact between the ground and the lining through the backfill. Therefore, due to the reaction of the segmental lining, the internal pressure grows as the tunnel face advances.
Plots for both the LDP and LCFP at the tunnel sidewall are shown in Fig. 9. It is noted that the contact between the cutterhead and the ground started in the last solving time step at the sidewall, with minimal forces being applied to the cutterhead. Also noted is a smaller gap between the ground and the TBM shield at the sidewall, because of a non-uniform overcut around the shield. The gap is maximum at the crown and gradually decreases to zero at the invert, where the machine rests against the floor.

LDP at the tunnel boundary and LCFP at the tunnel sidewall (spring-line level) for AR = 12 m/day
Therefore, closure of the gap occurs faster at the lower parts of the shield as boring proceeds. On the other hand, a slowdown in TBM advance may cause extended areas of contact between the rock and the shield as a consequence of the gradual movement of the ground due to creep. This results in closure of the gaps and loading of the shield, and, hence, higher frictional forces. Contact between the ground and the shields occurs at the sidewall soon after the advance of the machine behind the face. The contact forces on both the front and the rear shields increase to 10.5 and 10.4 MN, respectively.
The LPP along the tunnel sidewall is shown in Fig. 10. A redistribution of stresses at the sidewall due to some loading and unloading process similar to the mechanism at the crown is observed as discussed for Fig. 7.

LPP at the tunnel sidewall (spring-line level) for AR = 12 m/day
The contact forces between the ground and the front shield, as well as between the ground and the rear shield, are shown in Fig. 11. The required thrust force to overcome friction and drive the TBM forward is calculated by multiplying the integral of the total contact force obtained from the numerical analysis by the skin friction coefficient μ and the reduction coefficient β (i.e., ratio of the shield radius r to the tunnel radius R). The values of β for the front and rear shields are calculated to be 0.983 and 0.978, respectively.

Contact force distribution between the ground and shields for AR = 12 m/day
Then, the required maximum thrust force is obtained by the following relationship:
where N is the number of contact points (contact nodes) on the shield surface (Zhao et al. 2012). The skin friction coefficient μ is assumed to be 0.40 for restart after the installation of the segmental lining and for the average friction coefficient in this mode.
For the front shield, the maximum total thrust force by the thrust cylinders is the sum of the maximum cutterhead thrust F N and the required thrust to overcome friction F f, as follows:
-
For the front shield: F = F N + F f = 11 + 88.3 = 99.3 MN.
-
For the rear shield, the maximum cutterhead thrust is not taken into account: F = F f = 47.9 MN.
6.2 Effect of Advance Rate
To evaluate the effect of different advance rates on the rock mass behavior as well as loadings on the machine components, the LCFP for the contact forces on the shield at the crown and sidewall are plotted in Fig. 12 for different advance rates (3, 6, 12, and 24 m/day).

LCFP for different advance rates (3, 6, 12, and 24 m/day): a tunnel crown and b tunnel sidewall
As shown in Fig. 12a, the front shield is loaded to 8.5 MN at the crown, with higher values when the advance rate is 3 m/day compared to 6.6 MN for 24 m/day, a difference of 1.85 MN. This difference is 4.03 MN for the rear shield. Figure 12b shows this behavior at the sidewall. It is concluded that the entrapment of shielded TBMs can occur in squeezing ground during extended machine downtime or when lower advance rates are experienced.
6.3 Evaluation of TBM Entrapment Potential
Figure 13 shows the magnitude of the ground pressure around the machine for various advance rates at the cutterhead, end of the front shield, and end of the rear shield. The maximum ground pressure occurs at the invert. This is due to the non-uniform overcut, which causes immediate contact between the machine and the ground at the invert and gradual contact and increasing of the ground pressure on various points towards the crown and the back of the machine.

Load distribution (maximum values) on the TBM components for different advance rates
The weight of the machine accounts for additional load at the invert near the tunnel face. On the other hand, as also shown in Fig. 13, the impact of the advance rate on the applied pressure from the ground to the cutterhead and the front shield is not significant, but is more pronounced on the rear shield, where a lower load is anticipated at high advance rates.
For assessing the shield entrapment risk and predicting the thrust force, the maximum thrust force required is calculated for different advance rates, as illustrated in Fig. 14.

Required thrust force versus different advance rates
6.4 Effect of Advance Rate on the Loading of Segmental Linings
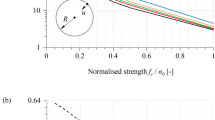
Figure 15 illustrates the ground pressure distribution on the lining. In particular, Fig. 15a shows that, after the installation of the segmental lining, the ground pressure is transferred uniformly to the ring due to the backfill, thus providing evidence of the importance of the backfill for achieving a uniform redistribution of stress around the lining.

Ground pressure around the lining: a distribution on the ring segment and b average ground pressure on the last set of segment rings versus TBM daily advance rate
Also, the role of the advance rate on the loading of the lining is shown to be significant. As clearly demonstrated on the same plot of Fig. 15a, for the advance rate of 24 m/day, the last set of segmental rings installed experiences about 2.5 MPa less than when the advance rate is 3 m/day. This allows the grout to harden and be able to take higher loads at a larger distances from the machine and the segments to take lower loads initially and hold their position.
Figure 15b shows the diagram that can be used for the prediction of ground pressure at the boundary of the segmental ring at variable advance rates. According to this diagram, the average pressure on the lining depends on the advance rates. By developing such diagrams for a specific tunnel, one can calculate the pressure distribution on the lining for a given advance rate and optimize the design of the lining system accordingly.
It should be noted that the results given in Fig. 15 are for short-term conditions, when the lining is located 30 m behind the face or, in other words, for the first group of segmental rings behind the shield. Thus, a further analysis is needed for the long-term conditions in order to assess the ground pressure distribution on the segmental lining for design purposes. This refers to the full loading conditions of the segment as time elapses and an equilibrium condition is reached between the in situ stresses in the ground and the segment.
The results of the numerical simulations performed illustrate the importance of the advance rate parameter on the prediction of the TBM entrapment potential. One should, however, be aware of the rather simple mathematical formulation of the CVISC model used and of its inherent limitations in the simulation of the time-dependent response of a tunnel (Barla et al. 2010). The model does not predict the observed deformation when the tunnel exhibits a gradual decrease in the rate of convergence, reaching a near-stable condition.
7 Conclusions
The time-dependent behavior of the ground and its impact on the loading of the shield and required thrust to move the machine forward, when tunneling with a double-shielded TBM, were studied in this paper. Numerical modeling was used to analyze the detailed configuration of the machine and its interaction with the intruding ground in a 3D simulation.
The most attention was directed to the possible machine entrapment in squeezing ground, by analyzing the magnitude of the ground pressure and loading for various points around the tunnel in both the circumferential and longitudinal directions. The contact forces on the front and rear shields that could lead to machine entrapment were evaluated.
The calculated contact pressure between the ground and the shield and the resulting frictional forces show that the effect of the advance rate on the ground load applied on the shields is more significant in the rear shield as compared to the front shield. Also, the average ground pressure on the lining ring immediately behind the machine is shown to be highly dependent on the advance rate.
It is concluded that, in practice, the information gained with the 3D simulation could be used to determine the daily advance rates that would avoid TBM entrapment. It is recognized that the impacts of long delays and standstill conditions have not been fully examined. In such cases, a more advanced constitutive law would be needed in order to account for the long-term behavior of the ground.
The results described are valid for a given set of rock mass and lining parameters. The conclusions drawn can be generalized when considering the effects of advance rates on the potential for machine entrapment. However, the load and displacement values as indicated are valid only for the input parameters used. In all cases, based on the 3D simulation tools as developed, generalized guidelines for the evaluation of machine entrapment potentials in various ground types could be prepared by systematic sensitivity analyses.
One should always be aware of the uncertainties regarding the geological conditions, the in situ stresses, and rock mass properties when assessing the potential of shield entrapment in a given underground project. Also, the limitation of the numerical simulation when modeling the ground behavior and the step-by-step nature of the solutions should be added to the list of uncertainties when using this approach for design purposes.
Abbreviations
- A :
-
Creep model parameter
- A i :
-
Shield surface
- AR :
-
Machine advance rate
- c :
-
Cohesion
- CPOW:
-
Power-law visco-plastic model
- CVISC:
-
Burger-creep visco-plastic model
- D :
-
Tunnel diameter
- e ij :
-
Deviatoric strain
- e vol :
-
Volumetric strain
- E :
-
Modulus of elasticity
- f :
-
Failure criterion
- F f :
-
Required maximum thrust force
- F N :
-
Maximum cutterhead thrust
- g :
-
Plastic potential
- G :
-
Shear modulus
- G K :
-
Kelvin shear modulus
- G M :
-
Maxwell shear modulus
- k n :
-
Normal stiffness
- k s :
-
Shear stiffness
- k t :
-
Tensile stiffness
- K :
-
Kelvin components
- K :
-
Bulk modulus
- K 0 :
-
In situ stress ratio
- LDP:
-
Longitudinal displacement profile
- LCFP:
-
Longitudinal contact force profile
- LPP:
-
Longitudinal ground pressure profile
- M:
-
Maxwell components
- MC:
-
Mohr Coulomb
- n :
-
Creep model parameter
- N :
-
Number of contact points
- p 0 :
-
In situ stress
- r :
-
Shield radius
- R :
-
Tunnel radius
- S i,j :
-
Deviatoric stress
- TBM:
-
Tunnel boring machine
- β :
-
Reduction coefficient
- \( {\dot{e}}\) :
-
Strain rate
- η K :
-
Kelvin viscosity
- η M :
-
Maxwell viscosity
- ψ :
-
Dilatancy angle
- ΔZ min :
-
Smallest width of an adjoining zone in the normal direction
- ϕ :
-
Friction angle
- γ :
-
Unit weight
- μ :
-
Skin friction coefficient
- ν :
-
Poisson’s ratio
- σ :
-
Deviatoric stress
- σ 0 :
-
Volumetric stress
- σ 1 :
-
Major principal stress
- σ 3 :
-
Minor principal stress
- σ h :
-
Horizontal stress
- σ t :
-
Tensile strength
- σ v :
-
Vertical stress
References
Amberg F (2009) Numerical simulations of tunnelling in soft rock under water pressure. In: ECCOMAS Thematic Conference on Computational Methods in Tunnelling (EURO:TUN 2009), Bochum, Germany, September 2009. Aedificatio Publishers, Freiburg, pp 353–360
Barla G (2001) Tunnelling under squeezing rock conditions. In: Kolymbas D (ed) Euro summerschool on tunnelling mechanics, Innsbruck, October 08–11, pp 169–268
Barla G (2010) Analysis of an extraordinary event of TBM entrapment in squeezing ground conditions. In: Pilgerstorfer T (ed) Festschrift zum 60. Geburtstag von Wulf Schubert, Technische Universitat Graz, pp 66–76
Barla G, Bonini M, Debernardi D (2010) Time dependent deformations in squeezing tunnels. Int J Geoeng Case Hist 2(1):40–65
Bonini M, Barla G (2012) The Saint Martin La Porte access adit (Lyon–Turin Base Tunnel) revisited. Tunn Undergr Space Technol 30:38–54
Bonini M, Debernardi D, Barla M, Barla G (2009) The mechanical behaviour of clay shales and implications on the design of tunnels. Rock Mech Rock Eng 42:361–388
Cantieni L, Anagnostou G (2009) The effect of the stress path on squeezing behavior in tunneling. Rock Mech Rock Eng 42(2):289–318
Concilia M, Grandori R (2004) New Viola Water Transfer Tunnel. Mechanized tunnelling: challenging case histories. International congress, GEAM Turin, pp 27–34
Debernardi D, Barla G (2009) New viscoplastic model for design analysis of tunnels in squeezing conditions. Rock Mech Rock Eng 42:259–288
Einstein HH, Bobet A (1997) Mechanized tunnelling in squeezing rock—from basic thoughts to continuous tunneling. Tunnels for people, ITA World Tunnel Congress ’97, Vienna, vol 2
Farmer I (1983) Engineering behaviour of rocks, 2nd edn. Chapman and Hall, London
Farrokh E, Rostami J (2009) Effect of adverse geological condition on TBM operation in Ghomroud tunnel conveyance project. Tunn Undergr Space Technol 24(4):436–446
Fjaer E, Holt RM, Horsrud P, Raaen AM, Risnes R (2008) Petroleum related rock mechanics, 2nd edn. Elsevier, Amsterdam
Graziani A, Ribacchi R, Capata A (2007) 3D-modelling of TBM excavation in squeezing rock mass. Brenner Basistunnel und Zulaufstrecken, Internationales symposium BBT 2007. Innsbruck University Press, Innsbruck, pp 143–151
Hasanpour R, Rostami J, Ünver B (2014) 3D finite difference model for simulation of double shield TBM tunneling in squeezing grounds. Tunn Undergr Space Technol 40:109–126
Hoek E, Guevara R (2009) Overcoming squeezing in the Yacambú-Quibor tunnel, Venezuela. Rock Mech Rock Eng 42(2):389–418
Itasca FLAC3D Manual (2006) Fast Lagrangian analysis of continua in 3D dimensions. User’s guide
Lombardi G (1981) Bau von Tunneln bei grossen Verformungen des Gebirges. In: Internationaler Kongress, Tunnel 81, Düsseldorf, Messegesellschaft mbH NOEWA Düsseldorf und Deutsche Gesellschaft für Erd- und Grundbau e.V., Essen, vol 2, pp 351–384
Lombardi G, Panciera A (1997) Problems with TBM and linings in squeezing ground. Tunnels and Tunnelling International No. 29. Miller Freeman plc, London, pp 54–56
Lombardi G, Neuenschwander M, Panciera A (2009) Gibraltar Tunnel Project update—the geomechanical challenges. Geomech Tunnel 2(5):578–590
Pellet F, Roosefid M, Deleruyelle F (2009) On the 3D numerical modelling of the time-dependent development of the damage zone around underground galleries during and after excavation. Tunn Undergr Space Technol 24:665–674
Ramoni M, Anagnostou G (2006) On the feasibility of TBM drives in squeezing ground. Tunn Undergr Space Technol 21(3–4):262
Ramoni M, Anagnostou G (2007) Numerical analysis of the development of squeezing pressure during TBM standstills. The second half century of rock mechanics, 11th Congress of the International Society for Rock Mechanics (ISRM), Lisbon, vol 2. Taylor & Francis Group, London, pp 963–966
Ramoni M, Anagnostou G (2008) TBM drives in squeezing rock–shield-rock interaction. Building underground for the future. AFTES International Congress, Monaco, Montecarlo. Edition specifique Limonest, pp 163–172
Ramoni M, Anagnostou G (2010) Tunnel boring machines under squeezing conditions. Tunn Undergr Space Technol 25:139–157
Ramoni M, Anagnostou G (2011a) The interaction between shield, ground and tunnel support in TBM tunnelling through squeezing ground. Rock Mech Rock Eng 44:37–61
Ramoni M, Anagnostou G (2011b) The effect of consolidation on TBM shield loading in water-bearing squeezing ground. Rock Mech Rock Eng 44:63–83
Schmitt JA (2009) Spannungsverformungsverhalten des Gebirges beim Vortrieb mit Tunnelbohrmaschinen mit Schild. Heft 89, dissertation, Institut für Grundbau und Bodenmechanik, Technische Universität Braunschweig
Shalabi FI (2005) FE analysis of time-dependent behavior of tunneling in squeezing ground using two different creep models. Tunn Undergr Space Technol 20:271–279
Sterpi D, Gioda G (2007) Ground pressure and convergence for TBM driven tunnels in visco-plastic rocks. In: ECCOMAS Thematic Conference on Computational Methods in Tunnelling (EURO:TUN 2007), Vienna University of Technology, pp 89–95
Wittke W, Wittke-Gattermann P, Wittke-Schmitt B (2007) TBM-heading in rock, design of the shield mantle. In: ECCOMAS Thematic Conference on Computational Methods in Tunnelling (EURO:TUN 2007), Vienna University of Technology, p 98
Zhao K, Janutolo M, Barla G (2012) A completely 3D model for the simulation of mechanized tunnel excavation. Rock Mech Rock Eng 45(4):475–497
Acknowledgments
The authors gratefully acknowledge the financial support of the Scientific and Technological Research Council of Turkey (TÜBİTAK) under Project No. MAG-114M568.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Hasanpour, R., Rostami, J. & Barla, G. Impact of Advance Rate on Entrapment Risk of a Double-Shielded TBM in Squeezing Ground. Rock Mech Rock Eng 48, 1115–1130 (2015). https://doi.org/10.1007/s00603-014-0645-2
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00603-014-0645-2