
Abstract
Uncertainty in bed roughness is a dominant factor in providing a sufficiently accurate simulation of floodplain flows. This study describes a method to compute the transition probability density distribution of time-varying water elevations where the evolutionary process is based on a conventional one-dimensional storage cell model with governing stochastic differential equation. By including the random inputs (or noise terms) of bed roughness and initial water depth, time-dependent and spatially varying probability density function of the water surface leads to a Fokker–Planck equation. The model’s performance is evaluated by applying it to shallow water flow with a horizontal bed. Sensitivity of model predictions to variations in the bed friction parameters is shown. By comparing the result of the proposed method with that of conventional Monte Carlo simulation, the advantage of the former as a method for density function prediction is confirmed.









Similar content being viewed by others
Abbreviations
- C v :
-
Coefficient of variation, \( 0 \le C_{\text{v}} \le 1 \), defined as the ratio of the standard deviation to the mean
- d:
-
Difference operator
- D :
-
Variance vector
- D :
-
Variance = \( C_{\text{v}} K_{\text{m}} \)
- D ij :
-
ith row and jth column component of D
- E:
-
Expectation operator
- f :
-
Random operator function
- g :
-
Acceleration due to gravity (m2/s)
- G :
-
Vector of deterministic operator of Itô equation
- G :
-
Deterministic operator of Itô equation = ϕ
- h :
-
Flow depth (m)
- h :
-
Discrete stochastic process vector
- H :
-
Stochastic process or random variable of flow depth or random state (which is a component of the state vector)
- H :
-
Stochastic process vector
- \( {\dot{\varvec{H}}} \) :
-
Time derivative of H
- H 0 :
-
Initial random state or random variable of flow depth H
- H 0 :
-
Initial H
- h 0 :
-
Initial flow depth (m)
- h max :
-
Maximum of h (m)
- h min :
-
Minimum of h (m)
- h m :
-
Mean of h (m)
- h s :
-
Standard deviation of h (m)
- i :
-
Along floodplain cell number
- j :
-
Flood depth node number
- k :
-
Time step of LISFLOOD-FP model
- m :
-
Time step of FP model
- K m :
-
Mean of N
- m h :
-
Number of the discrete values in flow depth direction
- n :
-
Manning’s friction coefficient (m−1/3 s)
- N :
-
Strickler coefficient = n −1 (m1/3/s)
- n d :
-
Dimension of state space
- n e :
-
Number of random parameters
- n m :
-
Mean of roughness n (m−1/3 s)
- n t :
-
Number of time steps
- p :
-
Probability density function
- p 0 :
-
Initial of p
- Q x :
-
Volumetric flow rates
- r :
-
0, 1, 2, …
- t :
-
Time (s)
- T:
-
Transpose of a matrix
- t d :
-
Consumed average time running for the deterministic model (s)
- t k :
-
Time in kth step of storage cell LISFLOOD-FP model (s)
- t PDE :
-
Time consumed for solving the partial differential equation (s)
- t r :
-
Time in rth step of Thomas algorithm (s)
- W :
-
Standard Gaussian white noise
- W :
-
Vector of Wiener process vector
- W i :
-
ith component of Wiener process W
- W′:
-
Standard Gaussian white noise process of n
- x :
-
Distance along floodplain (m)
- x :
-
Vector of x
- ∆h :
-
Size increment in flow depth direction (m)
- ∆t r :
-
Time increment of LISFLOOD-FP model (s)
- ∆t m :
-
Time increment of Thomas algorithm (s)
- ∆x :
-
Size increment in along floodplain direction (m)
- λ :
-
Ratio = \( \frac{{\Delta t_{r} }}{{\Delta t_{k} }} \)
- μ :
-
Mean
- ξ :
-
Random variable
- σ :
-
Standard deviation
- ϕ :
-
\( {\raise0.7ex\hbox{${\partial \left( {h_{\text{flow}}^{5/3} \left| {\frac{\partial h}{\partial x}} \right|^{1/2} } \right)}$} \!\mathord{\left/ {\vphantom {{\partial \left( {h_{\text{flow}}^{5/3} \left| {\frac{\partial h}{\partial x}} \right|^{1/2} } \right)} {\partial x}}}\right.\kern-0pt} \!\lower0.7ex\hbox{${\partial x}$}} \)
- \( {\boldsymbol{\varphi }} \) :
-
Operator vector of determination of a dynamical state, may be determined by an appropriate deterministic inundation evolution model
- ϕ i :
-
ith component of the operator \( {\boldsymbol{\varphi }} \)
- Ψ :
-
Random parameter vector
- Ψ :
-
Random parameter
References
Anderson JD (1995) Computational fluid dynamics: the basics with applications. McGrawHill, New York
Aronica G, Bates PD, Horritt MS (2002) Assessing the uncertainty in distributed model predictions using observed binary pattern information within GLUE. Hydro Process 16(10):2001–2016
Bates PD, De Roo APJ (2000) A simple raster-based model for flood inundation simulation. J Hydrol 236:54–77
Bates PD, Horritt MS, Aronica G, Beven K (2004) Bayesian updating of flood inundation likelihoods conditioned on inundation extent data. Hydro Process 18(17):3347–3370
Bates PD, Horritt MS, Fewtrell TJ (2010) A simple inertial formulation of the shallow water equations for efficient two-dimensional flood inundation modeling. J Hydrol 387:33–45
Bernardara P, Rocquigny E, Nicole Goutal N, Arnaud A, Passoni G (2010) Uncertainty analysis in flood hazard assessment: hydrological and hydraulic calibration. Can J Civ Eng 37:968–979
Bodo BA, Thompson ME, Unny TE (1987) A review on stochastic differential equations for applications in hydrology. Stoch Hydrol Hydraul 1(2):81–100
Brasington J, Vericat D, Rychkov I (2012) Modeling river bed morphology, roughness, and surface sedimentology using high resolution terrestrial laser scanning. Water Resour Res 48(11):1–18
Cayar M, Kavvas ML (2009) Ensemble average and ensemble variance behavior of unsteady, one-dimensional groundwater flow in unconfined, heterogeneous aquifers: an exact second-order model. Stoch Environ Res Risk Assess 23:947–956
Chow VT (1988) Open-channels hydraulics. McGraw-Hill, New York
Courant R, Friedrichs K, Lewy H (1967) On the partial difference equations of mathematical physics. IBM J Res Dev 11(2):215–234 (English translation of the original work)
Cunge JA, Holly FM, Verwey A (1980) Practical aspects of computational river hydraulics. Pitman Publishing, London
Dawson RJ, Hall JW, Sayers PB, Bates PD, Rosu C (2005) Sampling-based flood risk analysis for fluvial dike systems. Stoch Environ Res Risk Assess 19(6):388–402
Di Baldassarre G, Schumann G, Bates PD, Freer JE, Beven KJ (2010) Flood-plain mapping: a critical discussion of deterministic and probabilistic approaches. Hydrol Sci J 55(3):364–376
Dong P, Wu XZ (2013) Application of a stochastic differential equation to the prediction of shoreline evolution. Stoch Environ Res Risk Assess 27(8):1799–1814
Gardiner CW (2004) Handbook of stochastic methods for physics, chemistry, and the natural sciences. Springer, Berlin
Govindaraju RS, Kavvas ML (1991) Stochastic overland flows. Part 2: Numerical solutions evolutionary probability density functions. Stoch Hydrol Hydraul 5:105–124
Guganesharajah K, Lyons DJ, Parsons SB, Lloyd BJ (2006) Influence of uncertainties in the estimation procedure of floodwater level. J Hydraul Eng 132(10):1052–1060
Hall JW, Manning LJ, Hankin RKS (2011) Bayesian calibration of a flood inundation model using spatial data. Water Resour Res 47(5):1–14
Harman C, Stewardson M, DeRose R (2008) Variability and uncertainty in reach bankfull hydraulic geometry. J Hydrol 351:13–25
Heemink AW (1990) Stochastic modelling of dispersion in shallow water. Stoch Hydrol Hydraul 4(2):161–174
Horsthemke W, Lefever R (1980) A perturbation expansion for external wide band Markovian noise: application to transitions induced by Ornstein-Uhlenbeck noise. Zeitschrift für Physik B Condensed Matter 40(3):241–247
Hunter NM, Horritt MS, Bates PD, Wilson MD, Werner MGF (2005) An adaptive time step solution for raster-based storage cell modelling of floodplain inundation. Adv Water Resour 28(9):975–991
Hunter NM, Bates PD, Neelz S, Pender G, Villanueva I, Wright NG, Liang D, Falconer RA, Lin B, Waller S, Crossley AJ, Mason DC (2008) Benchmarking 2D hydraulic models for urban flooding. Water Manag 161(1):13–30
Jin M (1994) Random differential equation modelling for backwater profile computation. J Hydraul Res 32(1):131–143
Kavvas ML, Govindaraju RS (1991) Stochastic overland flows. Part 1: Physics-based evolutionary probability distributions. Stoch Hydrol Hydraul 5:89–104
Khatibi RH, Willians JJR, Wormleaton PR (1997) Identification problem of open-channel friction parameters. J Hydraul Eng 123(12):1078–1088
Kim S (2006) Probabilistic solution to soil water evaporated flow equation. KSCE J Civ Eng 10(1):59–65
Kinzel PJ, Wright CW, Nelson JM, Burman AR (2007) Evaluation of an experimental LiDAR for surveying a shallow, braided, sand-bedded river. J Hydraul Eng 133(7):838–842
Kloeden PE, Platen E (1992) The numerical solution of stochastic differential equations. Springer, New York
McBean E, Penel J, Siu KL (1984) Uncertainty analysis of a delineated floodplain. Can J Civ Eng 11:387–395
Milstein GN, Tretyakov MV (2004) Stochastic numerics for mathematical physics. Springer, Berlin Heidelberg New York
Nguyen HT, Fenton JD (2005) Identification of roughness in compound channels. In Zerger A, Argent RM (eds) MODSIM 2005 international congress on modelling and simulation. Modelling and Simulation Society of Australia and New Zealand, pp 2512–2518. ISBN: 0-9758400-2-9
Papadimitrakis IA, Orphanos I (2009) Statistical analysis of river characteristics (in Greece): basic hydraulic parameters. Hydrol Sci J 54(6):1035–1052
Plate EJ (1992) Stochastic design in hydraulics: concepts for a broader application. In: Proceedings, sixth IAHR international symposium on stochastic hydraulics, Taipei, pp 1–9
Risken H (1984) The Fokker–Planck equation. Springer, New York
Romanowicz R, Beven KJ (2003) Estimation of flood inundation probabilities as conditioned on event inundation maps. Water Resour Res 39(3):1073–1084
Romanowicz R, Beven KJ, Tawn J (1996) Bayesian calibration of flood inundation models. In: Anderson MG, Walling DE, Bates PD (eds) Floodplain processes. John Wiley and Sons, Chichester, pp 333–360
Sancho JM, San Migue M (1980) External non-white noise and nonequilibrium phase transitions. Zeitschrift für Physik B 36(4):357–364
Soong TT (1973) Random differential equations in science and engineering. Academic Press, New York
Sowinski M (2004) An uncertainty analysis of flood–stage upstream from a bridge. In: Proceedings of 6th international symposium on system analysis and integrated assessment in water management, Beijing, pp 97–105
Sowinski M (2007) Probability of flooding upstream from a bridge as a function of its construction. Intl J River Basin Manag 5(2):71–78
Spencer Jr BF, Bergman LA (1993) On the numerical solution of the Fokker–Planck equation for nonlinear stochastic systems. Nonlinear Dyn 4:357–372
Spivakovskaya D, Heemink AW, Schoenmakers JGM (2007) Two-particle models for the estimation of the mean and standard deviation of concentrations in coastal waters. Stoch Environ Res Risk Assess 21:235–251
Wang HF, Anderson MA (1982) Introduction to groundwater modeling: finite difference and finite element methods. W H Freeman and Co, San Francisco
Wehner MF, Wolfer WG (1983) Numerical evaluation of path integral solutions to the Fokker–Planck equations. Phys Rev A 27(5):2663–2670
Willis R, Finney BA, McKee M, Militello A (1989) Stochastic analysis of estuarine hydraulics: one dimensional steady flow. Stoch Environ Res Risk Assess 3(2):71–84
Wu XZ, Hall JW, Liang Q (2010) Coastal flood inundation modelling with a 2D shallow water equation solver. In: Proceedings of the twentieth (2010) international offshore and polar engineering conference, Beijing, pp 871–875
Yoon J, Kavvas ML (2003) Probabilistic solution to stochastic overland flow equation. J Hydrol Eng 8(2):54–63
Acknowledgments
The authors wish to thank Prof. Paul D. Bates at the University of Bristol for providing the source code of LISFLOOD-FP, who also kindly read the first draft of this paper and made most valuable comments.
Author information
Authors and Affiliations
Corresponding author
Appendices
Appendix 1: Theoretical framework for a general stochastic system
The SDE models play a prominent role in a wide range scientific and professional fields, including meteorology, mechanics, engineering, biology, and finance. A general spatially varying stochastic process is described by a random vector \( {\varvec{H}}({\varvec{x}},t) \), where x is the space coordinate vector of discretised grid cells over a planner slope and t is time. Its dynamical state is determined by
with the initial condition
where \( {\varvec{H}} = (H_{1} ,H_{2} , \ldots ,H_{{n_{\text{d}} }} )^{\text{T}} \) is the state vector, n d is the dimension of the state space, \( {\varvec{F}} = (F_{1} ,F_{2} , \ldots ,F_{{n_{\text{d}} }} )^{\text{T}} \) is the operator vector, \( {\varvec{\varPsi}} = (\varPsi_{1} ,\varPsi_{2} , \ldots ,\varPsi_{{n_{\text{e}} }} ) \) is a random parameter vector with known PDF \( p_{{\varvec{\varPsi}}} ({\varvec{\xi}}) \), random vector \( {\varvec{\xi}} = (\xi_{1} ,\xi_{2} , \ldots ,\xi_{{n_{\text{e}} }} ) \), and n e is the number of the random parameters involved. The system and the time evolution of H depend on the dynamic model F under consideration and the random parameter vector \( {\varvec{\varPsi}}\), which includes the stochastic parameters characterising the system properties, as well as the external excitations. When the excitation is a stochastic process, Eqs. (12) and (13) represent a stochastic dynamical system with randomness originating from the excitations, the system properties, and the initial conditions.
For a wide range of problems, a more specific model that characterises a Markovian process is often adopted. In this work, it was obtained by decomposition of the operator vector F as:
where \( {\varvec{\varphi }}({\varvec{H}},{\varvec{x}},t) \) is a function vector representing the effects of some form of drift, \( {\varvec{G}}({\varvec{H}},{\varvec{x}},t) \) is a function vector representing the effects of random diffusion, and W(t) is an n e-dimensional Gaussian (or white) noise vector. Assuming that the white noise processes are mutually independent, the co-variance parameter matrix of W(t) will be a diagonal matrix with its diagonal terms equal to the variance of the white noise processes \( W_{1} (t),W_{2} (t), \ldots ,W_{{n_{\text{e}} }} (t) \) and \( {\varvec{D}} = (D_{11} ,D_{22} , \ldots ,D_{{n_{\text{e}} n_{\text{e}} }} ) \).
Equation (14) can also be written in the form of the standard Itô equation (see Soong, 1973):
with \( {\text{E}}\left\{ {{\text{d}}{\varvec{W}}(t)} \right\} = {\varvec{0}} \) and \( {\text{E}}\left\{ {\left[ {{\text{d}}{\varvec{W}}(t)} \right]^{2} } \right\} = 2{\varvec{D}}{\text{d}}t \).
The dynamic system described by Eq. (15) with the deterministic operators \( {\varvec{\varphi }} \) and G and the random initial condition given by Eq. (13) is a probability preservative system and, with the PDF of H, i.e., \( p({\varvec{H}},{\varvec{x}},t) \), satisfying the FPE (Soong 1973):
The term \( (GDG^{T} )_{uv} \) is given by
where G uk and G vl are components of \( {\varvec{G}}({\varvec{H}},{\varvec{x}},t) \).
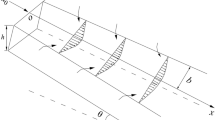
In this study, a stochastic flow depth evolution model is formulated based on the theoretical framework described above. The state function vector is derived using the one-dimensional storage cell model for floodplain flow (Bates and De Roo 2000). Thus, only one direction transport is considered to contribute to the flow surface changes, implying n d = 1. In addition, for the sake of simplicity, only the characteristic bed roughness parameter is taken as a random parameter, implying n e = 1.
Appendix 2: Derivation of Gaussian distribution of friction term
The Gaussian distribution provides a close approximation to the probability laws of many natural phenomena. In this study, it was used to represent a frequency distribution for the roughness coefficient. It has been widely used not only due to its greater flexibility and simplicity, but also because it can provide a good fit to field data. The Gaussian distribution function, which is a two-parameter function, for the floodplain roughness n is expressed mathematically as:
where μ and σ are the mean and standard deviation parameters, respectively.
Assuming that the roughness n follows the Gaussian distribution, the density of Strickler coefficient N can be derived easily, as shown below.
It has been shown that N behaves according to the Gaussian distribution, but the scale parameter reduces by N −2 times.
Rights and permissions
About this article

Cite this article
Wu, X.Z. Probabilistic solution of floodplain inundation equation. Stoch Environ Res Risk Assess 30, 47–58 (2016). https://doi.org/10.1007/s00477-015-1025-5
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00477-015-1025-5