
Abstract
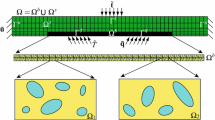
This manuscript presents the formulation and implementation of the variational multiscale enrichment (VME) method for the analysis of elasto-viscoplastic problems. VME is a global–local approach that allows accurate fine scale representation at small subdomains, where important physical phenomena are likely to occur. The response within far-fields is idealized using a coarse scale representation. The fine scale representation not only approximates the coarse grid residual, but also accounts for the material heterogeneity. A one-parameter family of mixed boundary conditions that range from Dirichlet to Neumann is employed to study the effect of the choice of the boundary conditions at the fine scale on accuracy. The inelastic material behavior is modeled using Perzyna type viscoplasticity coupled with flow stress evolution idealized by the Johnson–Cook model. Numerical verifications are performed to assess the performance of the proposed approach against the direct finite element simulations. The results of verification studies demonstrate that VME with proper boundary conditions accurately model the inelastic response accounting for material heterogeneity.











Similar content being viewed by others
References
Mote CD (1971) Global–local finite element. Int J Numer Methods Eng 3:565–574
Fish J, Markolefas S (1994) Adaptive global–local refinement strategy based on the interior error estimates of the h-method. Int J Numer Methods Eng 37:827–838
Gendre L, Allix O, Gosselet P, Comte F (2009) Non-intrusive and exact global/local techniques for structural problems with local plasticity. Comput Mech 44:233–245
Mao KM, Sun CT (1991) A refined global–local finite element analysis method. Int J Numer Methods Eng 32:29–43
Noor AK (1986) Global–local methodologies and their application to nonlinear analysis. Finite Elem Anal Des 2:333–346
Fish J (1992) The s-version of the finite element method. Comput Struct 43:539–547
Lloberas-Valls O, Rixen DJ, Simone A, Sluys LJ (2011) Domain decomposition techniques for the efficient modeling of brittle heterogeneous materials. Comput Methods Appl Mech Eng 200:1577–1590
Duarte CA, Kim DJ (2008) Analysis and applications of a generalized finite element method with global–local enrichment functions. Comput Methods Appl Mech Eng 197:487–504
Markovic D, Ibrahimbegovic A (2004) On micro–macro interface conditions for micro scale based fem for inelastic behavior of heterogeneous materials. Comput Methods Appl Mech Eng 193:5503–5523
Hughes TJR (1995) Multiscale phenomena: Green’s functions, the dirichlet-to-neumann formulation, subgrid-scale models, bubbles and the origins of stabilized methods. Comput Methods Appl Mech Eng 127:387–401
Hughes TJR, Feijoo GR, Quincy JB (1998) The variational multiscale method—a paradigm for computational mechanics. Comput Methods Appl Mech Eng 166:3–24
Garikipati K, Hughes TJR (2000) A variational multiscale approach to strain localization formulation for multidimensional problems. Comput Methods Appl Mech Eng 188:39–60
Hughes TJR, Sangalli G (2007) Variational multiscale analysis: the fine-scale Green’s function, projection, optimization, localization, and stabilized methods. SIAM J Numer Anal 45:539–557 (ISSN 00361429)
Arbogast T (2002) Implementation of a locally conservative numerical subgrid upscaling scheme for two-phase Darcy flow. Comput GeoSci 6:453–481
Arbogast T (2004) Analysis of a two-scale, locally conservative subgrid upscaling for elliptic problems. SIAM J Numer Anal 42:576
Oskay C (2012) Variational multiscale enrichment for modeling coupled mechano-diffusion problems. Int J Numer Methods Eng 89:686–705
Oskay C (2013) Variational multiscale enrichment method with mixed boundary conditions for modeling diffusion and deformation problems. Comput Methods Appl Mech Eng 264:178–190
Baiocchi C, Brezzi F, Franca LP (1993) Virtual bubbles and the Galerkin-least-squares method. Comput Methods Appl Mech Eng 105:125–142
Brezzi F, Franca LP, Hughes TJR, Russo A (1997) \(b=\int \!\! g\). Comput Methods Appl Mech Engrg 145:329–339
Juanes R, Dub F-X (2008) A locally conservative variational multiscale method for the simulation of porous media flow with multiscale source terms. Comput Geosci 12:273–295
Garikipati K (2003) Variational multiscale methods to embed the macromechanical continuum formulation with fine-scale strain gradient theories. Int J Numer Methods Eng 57:1283–1298
Masud A, Xia K (2006) A variational multiscale method for inelasticity: application to superelasticity in shape memory alloys. Comput Methods Appl Mech Eng 195:4512–4531
Yeon J, Youn S (2008) Variational multiscale analysis of elastoplastic deformation using meshfree approximation. Int J Solids Struct 45:4709–4724
Hund A, Ramm E (2007) Locality constraints within multiscale model for non-linear material behaviour. Int J Numer Methods Eng 70:1613–1632
Qian D, Wagner GJ, Liu WK (2004) A multiscale projection method for the analysis of carbon nanotubes. Comput Methods Appl Mech Eng 193:1603–1632
Berger-Vergiat L, Waisman H, Hiriyur B, Tuminaro R, Keyes D (2012) Inexact Schwarz-algebraic multigrid preconditioners for crack problems modeled by extended finite element methods. Int J Numer Methods Eng 90:311–328
Hiriyur B, Tuminaro RS, Waisman H, Boman EG, Keyes DE (2012) A quasi-algebraic multigrid approach to fracture problems based on extended finite elements. SIAM J Sci Comput 34:A603–A626
Waisman H, Berger-Vergiat L (2013) An adaptive domain decomposition preconditioner for crack propagation problems modeled by xfem. Int J Multisc Comp Eng 633–654:2013
Oskay C, Haney M (2010) Computational modeling of titanium structures subjected to thermo-chemo-mechanical environment. Int J Solids Struct 47:3341–3351
Yan H, Oskay C (2014) A three-field (displacement–pressure–concentration) formulation for coupled transport–deformation problems. Finite Elem Anal Des 90:20–30
Yan H, Oskay C (2015) A viscoelastic–viscoplastic model of titanium structures subjected to thermo-chemo-mechanical environment. Int J Solids Struct 56–57:29–42
Garikipati K, Hughes TJR (1998) A study of strain localization in a multiple scale framework—the one-dimensional problem. Comput Methods Appl Mech Eng 159:193–222
Coenen EWC, Kouznetsova VG, Geers MGD (2012) Novel boundary conditions for strain localization analyses in microstructural volume elements. Int J Numer Methods Eng 90:1–21
Ghosh S, Paquet D (2013) Adaptive concurrent multi-level model for multi-scale analysis of ductile fracture in heterogeneous aluminum alloys. Mech Mater 65:12–34
Mergheim J (2009) A variational multiscale method to model crack propagation at finite strains. Int J Numer Methods Eng 80:269–289
Langtangen HP (2003) Computational partial differential equations: numerical methods and diffpack programming. Springer, Berlin
Crouch R, Oskay C (2010) Symmetric meso-mechanical model for failure analysis of heterogeneous materials. Int J Solids Struct 8:447–461
Oskay C, Fish J (2007) Eigendeformation-based reduced order homogenization for failure analysis of heterogeneous materials. Comput Methods Appl Mech Eng 196:1216–1243
Acknowledgments
The authors gratefully acknowledge the research funding from the Air Force Office of Scientific Research Multi-Scale Structural Mechanics and Prognosis Program (Grant No.: FA9550-13-1-0104. Program Manager: Dr. David Stargel). We also acknowledge the technical cooperation with Dr. Ravinder Chona and Dr. Ravi Penmetsa at the Air Force Research Laboratory, Structural Sciences Center.
Author information
Authors and Affiliations
Corresponding author
Appendix
Appendix
This appendix section presents the details of \(\mathbf{C} = \left( \frac{\partial \dot{\varvec{\varepsilon }}^{vp}}{\partial \varvec{\sigma } }\right) \) and \(\mathbf{G} = \left( \frac{\partial \dot{\varvec{\varepsilon }}^{vp}}{\partial \varvec{\varepsilon }^{vp} }\right) \) that are illustrated in Sect. 4.1. For the clarity of presentation, the bold symbol in this section denotes vector notation. Recall the evoluation of plastic strain (Eq. (5)), the loading function [Eq. (6)] and the flow stress [Eq. (8)]. Define
and
where, in 3D case \(\tilde{\varvec{\sigma }}\) is expressed in a vector format as:
in which \(s\) denotes deviatoric stress components. Consequently, the plastic strain evolution equation is expressed as:
and \(\mathbf{C}\) becomes:
From Eq. (61):
In 3D case, \(\mathbf{M}\) is expressed as:
Employing, \(\mathbf {M}\), \(\mathbf{C}\) is written as:
Using Eq. (63):
Employing chain rule, we obtain:
Therefore,
Rights and permissions
About this article

Cite this article
Zhang, S., Oskay, C. Variational multiscale enrichment method with mixed boundary conditions for elasto-viscoplastic problems. Comput Mech 55, 771–787 (2015). https://doi.org/10.1007/s00466-015-1135-4
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00466-015-1135-4