
Abstract.
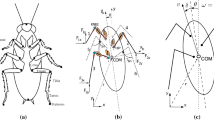
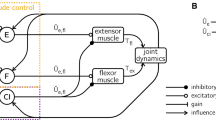
A multisegment, multijoint model of a falling animal is presented to examine the effectiveness of a two-stage control scheme in a zero-momentum self-righting maneuver. The model contains a much larger number of degrees of freedom than is required to execute a self-righting maneuver and is thus capable of providing multiple solutions for the same task. The decentralized control scheme is designed to achieve gross turning in minimum time and to maintain a steady orientation relative to gravity after the turn has been achieved. The scheme is able to determine the sequence of steps necessary to execute the motor task and also incorporates learning features. Results from various simulations are presented and their implications discussed.
Similar content being viewed by others

Author information
Authors and Affiliations
Additional information
Received: 26 June 1995 / Accepted in revised form: 30 June 1998
Rights and permissions
About this article
Cite this article
Arabyan, A., Tsai, D. A distributed control model for the air-righting reflex of a cat. Biol Cybern 79, 393–401 (1998). https://doi.org/10.1007/s004220050488
Issue Date:
DOI: https://doi.org/10.1007/s004220050488