
Abstract
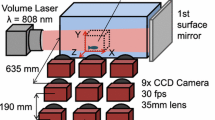
Stereoscopic PIV was used to measure the three-component velocity distribution around a live fish. At the same time, shadow images of the fish were captured by additional cameras in order to reconstruct the three-dimensional shape of the fish. The side jet shed against the swept tail during turning was evident in the results. The height of the jet was approximately equal to the height of the tail fin, and a vortex ring was observed around the side jet. Based on the circulation and diameter of the vortex ring, the impulse and time-averaged force in terms of the side jet were estimated.










Similar content being viewed by others

References
Anderson JM, Streitlien K, Barrett DS, Triantafyllou MS (1998) Oscillating foils of high propulsive efficiency. J Fluid Mech 360:41–72
Breder CM (1926) The locomotion of fishes. Zoologica IV 5:159–297
Drucker EG, Lauder GV (1999) Locomotor forces on a swimming fish: three-dimensional vortex wake dynamics quantified using digital particle image velocimetry. J Exp Biol 202:2393–2412
Drucker EG, Lauder GV (2000) A hydrodynamic analysis of fish swimming speed: wake structure and locomotor force in slow and fast labriform swimmers. J Exp Biol 203:2379–2393
Drucker EG, Lauder GV (2001) Wake dynamics and fluid forces of turning maneuvers in sunfish. J Exp Biol 204:431–442
Gopalkrishnan R, Triantafyllou MS, Triantafyllou GS, Barrett D (1994) Active vorticity control in a shear flow using a flapping foil. J Fluid Mech 274:1–21
Gray J (1936) Studies in animal locomotion 6. The propulsive powers of the dolphin. J Exp Biol 13,2:265–301
Hecht E (1990) Optics, 2nd edn. Addison Wesley, Boston, MA, pp 226
Lighthill J (1960) Note on the swimming of slender fish. J Fluid Mech 9:305–317
Lighthill J (1970) Aquatic animal propulsion of high hydromechanical efficiency. J Fluid Mech 44:265–301
Milne-Thomson LM (1966) Theoretical aerodynamics. Macmillan, New York
Muller UK, Van Den Heuvel BLE, Stamhuis EJ, Videler JJ (1997) Fish foot prints: morphology and energetics of the wake behind a continuously swimming mullet (chelon labrosus risso). J Exp Biol 200:2893–2906
Prasad AK, Adrian RJ (1993) Stereoscopic particle image velocimetry applied to liquid flows. Exp Fluids 15:49–60
Solof SM, Adrian RJ, Liu ZC (1997) Distortion compensation for generalized stereoscopic particle image velocimetry. Meas Sci Tech 8:1441–1454
Stamhuis EJ, Videler JJ (1995) Quantitative flow analysis around aquatic animals using laser sheet particle image velocimetry. J Exp Biol 198:283–294
Taneda S, Tomonari Y (1974) An experiment on the flow around a waving plate. J Phys Soc Jpn 36,6:1683–1689
Wolfgang MJ, Anderson JM, Grosenbaugh MA, Yue DKP, Triantafyllou MS (1999a) Near-body flow dynamics in swimming fish. J Exp Biol 202:2303–2327
Wolfgang MJ, Triantafyllou MS, Yue DKP (1999b) Visualization of complex near-body transport process in flexible-body propulsion. J Visual-Japan 2,2:143–151
Wu TYT (1971) Hydrodynamics of swimming propulsion, part 2: Some optimum shape problems. J Fluid Mech 46:521–544
Acknowledgements
We appreciate the help of the technical staff of our institute, Mr. T. Nakajima, Mr. M. Kobe and Mr. F. Yamada, for the construction of the calibration plate with three-dimensional traversing mechanisms.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Sakakibara, J., Nakagawa, M. & Yoshida, M. Stereo-PIV study of flow around a maneuvering fish. Exp Fluids 36, 282–293 (2004). https://doi.org/10.1007/s00348-003-0720-z
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00348-003-0720-z