
Abstract
This study presents a two-class, overlapping-generation model featuring social mobility inhibited by the mismatch of talents. Mobility decreases as the private education gap between the two classes widens, whereas it increases with increased public education spending. Within this framework, the study considers voting on public education and shows that when the political power of the rich is strong, the government implements low redistributive expenditures, which in turn induces a cyclical motion of social mobility across generations.









Similar content being viewed by others

Notes
Equation (4) can be rewritten as follows:
$$\begin{aligned} 1-{\tilde{q}}_{t+1}=1-c+d\cdot \left( e_{t}-\ln s_{t}^{\mathrm{R}}+\ln s_{t}^{\mathrm{P}}\right) . \end{aligned}$$From \(\frac{\partial (1-{\tilde{q}}_{t+1})}{\partial s_{t}^{\mathrm{R}}}<0\) and \(\frac{\partial (1-{\tilde{q}}_{t+1})}{\partial s_{t}^{\mathrm{P}}}>0\), higher private investment by rich and poor parents increases the probability of their own child becoming rich, as in Fan and Zhang (2013). It is important to note that private education has externalities, which means that an increase in private investment by rich (poor) parents decreases the probability that the children of poor (rich) parents become rich.
The mismatch of talents is also affected by the fraction of workers allocated to the correct social class with a probability 1, \(\epsilon _{t}\). We ignore this effect in the demonstration of the mechanism since it is not a qualitatively crucial factor in explaining the cyclical motion of GDP and social mobility.
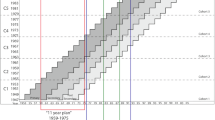
Source: OECD.stat (stats.oecd.org, April 18, 2016).
References
Aaronson, D., Mazumder, B.: Intergenerational economic mobility in the United States, 1940–2000. J. Hum. Resour. 43, 139–172 (2008)
Arcalean, C., Schiopu, I.: Inequality, opting-out and public education funding. Soc. Choice Welf. 46, 811–837 (2016)
Atkinson, A.B., Trinder, C.G., Maynard, A.K.: Evidence on intergenerational income mobility in Britain. Econ. Lett. 1, 119–123 (1978)
Atkinson, A.B.: On intergenerational income mobility in Britain. J.Post Keynes. Econ. 3, 194–218 (1981)
Bachmann, R., Bai, J.H.: Politico-economic inequality and the comovement of government purchases. Rev. Econ. Dyn. 16, 565–580 (2013)
Becker, G.S., Tomes, N.: An equilibrium theory of the distribution of income and intergenerational mobility. J. Polit. Econ. 87, 1153–1189 (1979)
Benabou, R.: Unequal societies: income distribution and the social contract. Am. Econ. Rev. 90, 96–129 (2000)
Bernasconi, M., Profeta, P.: Redistribution or Education? The Political Economy of the Social Race. CESifo Working Paper Series No. 1934 (2007)
Bernasconi, M., Profeta, P.: Public education and redistribution when talents are mismatched. Eur. Econ. Rev. 56, 84–96 (2012)
Blankenau, W., Cassou, S.P., Ingram, B.: Allocating government education expenditures across K-12 and college education. Econ. Theory 31, 85–112 (2007)
Bratberg, E., Nilsen, Ø.A., Vaage, K.: Trends in intergenerational mobility across offspring’s earnings distribution in Norway. Ind. Relat. 46, 112–119 (2007)
Cremer, H., de Donder, P., Pestieau, P.: Education and social mobility. Int. Tax Public Financ. 17, 357–377 (2010)
Davis, J.B., Zhang, J., Zeng, J.: Intergenerational mobility under private vs. public education. Scand. J. Econ. 107, 399–417 (2005)
Fan, C., Stark, O.: Looking at the “population problem” through the prism of heterogeneity: welfare and policy analysis. Int. Econ. Rev. 49, 799–835 (2008)
Fan, C., Zhang, J.: Differential fertility and intergenerational mobility under private versus public education. J. Popul. Econ. 26, 907–941 (2013)
Ichino, A., Karabarbounis, L., Moretti, E.: The political economy of intergenerational income mobility. Econ. Inq. 49, 47–69 (2011)
Persson, T., Tabellini, G.: Political Economics: Explaining Economic Policy. MIT Press, Cambridge (2000)
Author information
Authors and Affiliations
Corresponding author
Additional information
I am grateful for comments and suggestions from an anonymous referee, Tetsuo Ono, and Akira Yakita. I am also grateful for comments and suggestions from participants at 2014 Japanese Economic Association Spring Meeting at Doshisha University and 2015 Japan Association for Applied Economics Autumn Meeting at Dokkyo University. I gratefully acknowledge the financial support from Grant-in-Aid for JSPS Fellows of the Japan Society for the Promotion of Science No. 15J01375.
Appendix
Appendix
1.1 Derivation of Eq. (2)
As shown in Table 1, workers in period \(t+1\) can be classified into four types according to the transmission of innate ability from their parents to them and their parents’ social classes. Given Assumptions (A1) and (A2), type A and type D workers are allocated to the correct social class with a probability 1. Type B and type C workers are allocated to the correct social class with a probability \(\alpha _{t+1}\). By using this classification, Eq. (2) is obtained as follows:
1.2 Derivation of Eq. (3)
Given the classification in Table 1 and Assumptions (A1) and (A2), type A and type D workers are allocated to the same social class as that of their parents with a probability 1. Type B and type C workers are allocated to the same social class as that of their parents with a probability \(1-\alpha _{t+1}\). By using this classification, Eq. (3) is obtained as follows:
1.3 Proof of Proposition 1
The procedure for the proof of Proposition 1 is identical to that in Bernasconi and Profeta (2007, 2012). The first- and second-order derivatives of \(\tau _{t}\) and \(\gamma _{t}\) are obtained as follows:
Given \(\frac{B}{1+\eta +B}<\omega <\frac{1+\eta +B}{B}\) from Assumption 1, \(\frac{\partial ^{2}W}{\partial \tau _{t}^{2}}<0\) and \(\frac{\partial ^{2}W}{\partial \gamma _{t}^{2}}<0\) hold. Note that \(\lim _{\tau _{t}\rightarrow 0}\frac{\partial W}{\partial \tau _{t}}=+\infty \), \(\lim _{\gamma _{t}\rightarrow 1}\frac{\partial W}{\partial \gamma _{t}}=-\infty \), \(\lim _{\tau _{t}\rightarrow 1}\frac{\partial W}{\partial \tau _{t}}\big |_{\gamma _{t}=0}=-\infty \), and \(\lim \nolimits _{\gamma _{t}\rightarrow 0}\frac{\partial W}{\partial \gamma _{t}}\big |_{\tau _{t}=1}=+\infty \). Therefore, the optimal pair of policies, \((\tau _{t}^{*},\gamma _{t}^{*})\), can be classified into the following three types: \(\tau _{t}\in (0,1)\) and \(\gamma _{t}=0\), \(\tau _{t}=1\) and \(\gamma _{t}\in (0,1)\), and \(\tau _{t}\in (0,1)\) and \(\gamma _{t}\in (0,1)\). All variables are indexed by t and thus we omit the index t from the expressions.
-
Case \(1\le \omega <\frac{1+\eta +B}{B}\)
Suppose that \(1\le \omega <\frac{1+\eta +B}{B}\). The following inequality holds:
To simplify the notations, we define the functions as follows:
Given these definitions, we can rewrite (22) as \(\partial W/\partial \tau =C(\tau ,\gamma ,\omega )+D(\tau ,\gamma ,\omega )\).
We obtain the first derivatives of \(C(\tau ,\gamma ,\omega )\) with respect to \(\tau \) as follows:
To compute the optimal pair of policies, we perform four steps. In step 1, we show that \(C(1,1,1)=0\). In step 2, we show that \(C(\tau , \gamma ^{*}, \omega )+D(\tau , \gamma ^{*}, \omega )>C(\tau ,1,1)\) for \(\gamma ^{*}\), such that \(\frac{\partial W}{\partial \gamma }|_{\gamma =\gamma ^{*}}=0\). In step 3, we show that if the optimal solution exists, it is a pair of policies, (\(\tau ^{*}=1\), \(\gamma ^{*}\in (0,1)\)). In step 4, we show that such an equilibrium uniquely exists and compute the value of \(\gamma ^{*}\in (0,1)\).
Step 1
Given the definition of \(C(\tau ,\gamma ,\omega )\), we have
Hence, we obtain
Step 2
Let \(\gamma ^{*}\) satisfy \(\frac{\partial W}{\partial \gamma }|_{\gamma =\gamma ^{*}}=0\). Then, we can rewrite (23) as follows:
Suppose that \(\gamma ^{*}\in (0,1)\) and \(y^{\mathrm{R}}>y^{\mathrm{P}}\). Given (24), we have
Given \(1\le \omega <\frac{1+\eta +B}{B}\), \(y^{\mathrm{R}}>y^{\mathrm{P}}\), (26), (28), and (29), we obtain
Step 3
Given (25), (27), and (30), the following inequality holds:
Given \(\partial ^{2}W/\partial \tau ^{2}<0\) and (31), we find that \(\tau ^{*}=1\) is optimal when the optimal fraction \(\gamma ^{*}\) is internal.
Step 4
First, we show the existence and uniqueness of the \(\gamma ^{*}\) considered in step 3 in the interval (0, 1). Given \(\lim \nolimits _{\gamma \rightarrow 1}\frac{\partial W}{\partial \gamma }=-\infty \), \(\lim \nolimits _{\gamma \rightarrow 0}\frac{\partial W}{\partial \gamma }\big |_{\tau =1}=+\infty \), and \(\partial ^{2}W/\partial \gamma ^{2}<0\), we find that \(\gamma ^{*}\) uniquely exists in the interval (0, 1).
Next, we show that a pair of policies (\(\tau \in (0,1), \gamma =0\)), is not optimal. Suppose that \(\tau \in (0,1)\) and \(\gamma =0\). Given (22), we obtain the following equation:
Substituting (32) into (23) leads to
Therefore, the following property holds:
Given \(y^{\mathrm{R}}>y^{\mathrm{P}}\) and (24), \(\frac{\partial W}{\partial \gamma }\Big |_{\tau \in (0,1), \gamma =0}>0\) holds, which implies that a pair of policies (\(\tau \in (0,1), \gamma =0\)), cannot be optimal.
We now compute the value of \(\gamma ^{*}\), which solves the following equation:
where \(f(\gamma )\) is defined as follows:
Note that the coefficient of \(\gamma ^{2}\) is positive and \(f(\gamma )\) has the following properties:
Therefore, we obtain the value of \(\gamma ^{*}\) as follows:
where E is defined by \(E\equiv (1+\omega )(1+\eta )+(1+\omega )\xi +B(\omega -1){\overline{y}}\).
-
Case \(\frac{B}{1+\eta +B}<\omega <1\)
First, we show that \(\tau =1\) cannot be optimal when \(\frac{B}{1+\eta +B}<\omega <1\). Recall that the optimal pair of policies can be classified into the following three types: \(\tau \in (0,1)\) and \(\gamma =0\), \(\tau =1\) and \(\gamma \in (0,1)\), and \(\tau \in (0,1)\) and \(\gamma \in (0,1)\). Therefore, if \(\tau =1\) is optimal, the optimal \(\gamma \) is \({\hat{\gamma }}\in (0,1)\), which satisfies the following equation:
Suppose that \(\tau =1\), \(\gamma ={\hat{\gamma }}\), \(\frac{B}{1+\eta +B}<\omega <1\), and \(y^{\mathrm{R}}>y^{\mathrm{P}}\). We obtain
where the second line uses (34). Given \(\partial ^{2}W/\partial \tau ^{2}<0, \lim _{\tau \rightarrow 0}\frac{\partial W}{\partial \tau }=+\infty \), and (35), we find that a pair of policies (\(\tau =1, {\hat{\gamma }}\in (0,1)\)), cannot be optimal.
Hence, the optimal pair of policies can be of the following two types: \(\tau \in (0,1)\) and \(\gamma =0\), and \(\tau \in (0,1)\) and \(\gamma \in (0,1)\). Given \(\partial ^{2}W/\partial \gamma ^{2}<0\) and \(\lim _{\gamma \rightarrow 1}\frac{\partial W}{\partial \gamma }=-\infty \), (i) a pair of policies, (\(\tau \in (0,1), \gamma =0\)), is optimal if \(\frac{\partial W}{\partial \gamma }\big |_{\tau \in (0,1),\gamma =0}\le 0\) holds and (ii) a pair of policies, (\(\tau \in (0,1), \gamma \in (0,1)\)), is optimal if \(\frac{\partial W}{\partial \gamma }\big |_{\tau \in (0,1),\gamma =0}>0\) holds. Given (33), we can rewrite these conditions as follows:
-
Sub-case \(\frac{B}{1+\eta +B}<\omega \le \frac{By^{\mathrm{R}}+(1+\eta +B)y^{\mathrm{P}}}{(1+\eta +B)y^{\mathrm{R}}+By^{\mathrm{P}}}\)
In this case, a pair of policies (\(\tau ^{*}\in (0,1), \gamma ^{*}=0\)), is optimal. Therefore, \(\tau ^{*}\) solves the following equation:
where \(g(\tau )\) is defined as follows:
Note that the coefficient of \(\tau ^{2}\) is positive, and \(g(\tau )\) has the following properties:
Therefore, we obtain the value of \(\tau ^{*}\) as follows:
where F is defined by \(F\equiv (1+\omega )(1+\eta )+(1+\omega )\xi +B(1-\omega ){\overline{y}}\).
-
Sub-case \(\frac{By^{\mathrm{R}}+(1+\eta +B)y^{\mathrm{P}}}{(1+\eta +B)y^{\mathrm{R}}+By^{\mathrm{P}}}<\omega <1\)
In this case, a pair of policies (\(\tau ^{*}\in (0,1), \gamma ^{*}\in (0,1)\)), is optimal. Therefore, \(\tau ^{*}\) and \(\gamma ^{*}\) solve the following equations:
By substituting (36) into (37) and rearranging the terms, we obtain
Substituting (38) into (37) results in
To eliminate \(\gamma \) from (40), substituting (39) into (40) gives us
where \(h(\tau )\) is defined as follows:
Note that the coefficient of \(\tau ^{2}\) is positive and \(h(\tau )\) has the following properties:
Therefore, we obtain the value of \(\tau ^{*}\) as follows:
where G and I are defined as follows:
By substituting (41) into (39), the value of \(\gamma ^{*}\) is obtained as follows:
1.4 Derivation of Eqs. (17) and (18)
Table 2 summarizes the information on the allocation of workers and output levels in a low-income occupation. From the result presented in Table 2, we can compute \(y_{t+1}^{\mathrm{P}}\) as follows:
Table 3 summarizes the information on the allocation of workers and output levels in a high-income occupation. From the result presented in Table 3, we can compute \(y_{t+1}^{\mathrm{R}}\) as follows:
1.5 Mismatch of talents, GDP, and pre-tax inequality
By using Eqs. (17) and (18), the following equations are obtained as follows:
If \(h_{t+1}^{\mathrm{P,H}}\ge h_{t+1}^{\mathrm{R,L}}\) is satisfied, \(\frac{\partial y_{t+1} ^{\mathrm{P}}}{\partial \theta _{t+1}}\le 0\), and \(\frac{\partial y_{t+1}^{\mathrm{R}}}{\partial \theta _{t+1}}\ge 0\) hold. This implies that a higher level of social mobility results in a larger level of pre-tax inequality between the rich and poor.
From Eqs. (16), (42), and (43), the following equations are obtained as follows:
If \(h_{t+1}^{\mathrm{P,H}}\ge h_{t+1}^{\mathrm{R,L}}\) and \(m_{t+1}\ge 1/2\) are satisfied, \(\frac{\partial {\overline{y}}_{t+1}}{\partial \theta _{t+1}}\ge 0\) holds.
We now turn to verify whether \(h_{t+1}^{\mathrm{P,H}}\ge h_{t+1}^{\mathrm{R,L}}\) and \(m_{t+1}\ge 1/2\) for all t are satisfied.

a, c Plot the dynamics of individual human capital. b, d Plot the dynamics of the fraction of workers allocated to the correct social class. We set \(\omega =1.0\) in a, b and \(\omega =0.3\) in c, d. In a and c, the solid curve presents the human capital of workers with high innate ability whose parents are poor and the dotted curve presents the human capital of workers with low innate ability whose parents are rich
As shown in Fig. 10, \(h_{t+1}^{\mathrm{P,H}}\ge h_{t+1}^{\mathrm{R,L}}\) and \(m_{t+1}\ge 1/2\) for all t are satisfied in the present numerical analysis. Therefore, \(\frac{\partial y_{t+1}^{\mathrm{P}}}{\partial \theta _{t+1}}\le 0\), \(\frac{\partial y_{t+1}^{\mathrm{R}}}{\partial \theta _{t+1}}\ge 0\), and \(\frac{\partial \overline{y}_{t+1}}{\partial \theta _{t+1}}\ge 0\) hold for all t.
1.6 Numerical algorithm
We describe the numerical procedure to simulate the dynamics of GDP, aggregate human capital, social mobility, and the fraction of workers who have the same ability as their parents and belong to the occupation reflecting their innate ability. It is sufficient to use GDP to check economic convergence because it summarizes all the information on the economy. The procedure is as follows.
Step 1
We set the initial values \(y_{1}^{\mathrm{P}}, y_{1}^{\mathrm{R}}, {\overline{y}}_{1}, \overline{H}_{1}\), and \(m_{1}\).
Step 2
Given \(y_{t}^{\mathrm{P}}, y_{t}^{\mathrm{R}}, {\overline{y}}_{t}, {\overline{H}}_{t}\), and \(m_{t}\) for any t, we obtain \(y_{t+1}^{\mathrm{P}}, y_{t+1}^{\mathrm{R}}, {\overline{y}}_{t+1}, {\overline{H}}_{t+1}, m_{t+1}\) by using the following equations:
-
1.
\(\tau _{t}=\left\{ \begin{array}{ll} \frac{F-\sqrt{F^{2}-4B(1-\omega )(1+\omega ){\overline{y}}_{t}\xi } }{2B(1-\omega ){\overline{y}}_{t}}&{}\quad \text {if}\,\frac{B}{1+\eta +B}<\omega \le {\tilde{\omega }}_{t},\\ \frac{G-\sqrt{G^{2}-2B(1+\eta )(1+\omega )\left( y_{t}^{\mathrm{R}}-y_{t}^{\mathrm{P}}\right) ^{2}I} }{B(1+\eta )(1+\omega )\left( y_{t}^{\mathrm{R}}-y_{t}^{\mathrm{P}}\right) ^{2}} &{}\quad \text {if}\,\tilde{\omega }_{t}<\omega<1,\\ 1&{}\quad \text {if}\, 1\le \omega <\frac{1+\eta +B}{B}, \end{array} \right. \)
where
$$\begin{aligned} F= & {} (1+\omega )(1+\eta )+(1+\omega )\xi +B(1-\omega ){\overline{y}}_{t},\\ G= & {} {\overline{y}}_{t}(1-\omega )((1+\eta +B)+B)\left[ 2((1+\eta +B)+B)+B\left( y_{t}^{\mathrm{R}}-y_{t}^{\mathrm{P}}\right) \right] \\&+\,2\left[ (\omega (1+\eta +B)-B)y_{t}^{\mathrm{R}}-((1+\eta +B)-\omega B)y_{t}^{\mathrm{P}}\right] \\&\left[ ((1+\eta +B)+B)+B\left( y_{t}^{\mathrm{R}}-y_{t}^{\mathrm{P}}\right) \right] \\&+\,((1+\eta +B)+B)(1+\omega )\xi \left( y_{t}^{\mathrm{R}}-y_{t}^{\mathrm{P}}\right) ,\\ I= & {} \left[ 2((1+\eta +B)+B)+B\left( y_{t}^{\mathrm{R}}-y_{t}^{\mathrm{P}}\right) \right] \\&\left[ (\omega (1+\eta +B)-B)y_{t}^{\mathrm{R}}-((1+\eta +B)-\omega B)y_{t}^{\mathrm{P}}\right] \\&+\,(1+\omega )((1+\eta +B)+B)\xi \left( y_{t}^{\mathrm{R}}-y_{t}^{\mathrm{P}}\right) , \end{aligned}$$ -
2.
\(\gamma _{t}=\left\{ \begin{array}{ll} 0 &{}\quad \text {if}\, \frac{B}{1+\eta +B}<\omega \le {\tilde{\omega }}_{t},\\ \frac{(1-\tau _{t})\left( (\omega (1+\eta +B)-B)y_{t}^{\mathrm{R}}-((1+\eta +B)-\omega B)y_{t}^{\mathrm{P}} \right) }{(1-\omega )((1+\eta +B)+B)\tau _{t}{\overline{y}}_{t}}&{} \quad \text {if}\,{\tilde{\omega }}_{t}<\omega<1,\\ \frac{E-\sqrt{E^{2}-4B(\omega -1){\overline{y}}_{t}(1+\omega )(1+\eta )} }{2B(\omega -1){\overline{y}}_{t}}&{}\quad \text {if}\,1\le \omega <\frac{1+\eta +B}{B}, \end{array} \right. \)
where \(E=(1+\omega )(1+\eta )+(1+\omega )\xi -B(1-\omega ){\overline{y}} _{t},\)
-
3.
\(b_{t}=\gamma _{t}\tau _{t}{\overline{y}}_{t},\)
-
4.
\(e_{t}=(1-\gamma _{t})\tau _{t}{\overline{y}}_{t},\)
-
5.
\(s_{t}^{i}=\frac{\eta +B}{1+\eta +B}((1-\tau _{t})y_{t}^{i}+b_{t}),\quad i=P,R,\)
-
6.
\(h_{t+1}^{i,j}=e_{t}^{\xi }(s_{t}^{i})^{\eta }{\overline{H}}_{t}^{\delta }A^{j}, \quad i=P,R, \quad j=L,H,\)
-
7.
\(\theta _{t+1}=1-c+d \cdot (e_{t}-\ln (s_{t}^{\mathrm{R}}/s_{t}^{\mathrm{P}})),\)
-
8.
\(\epsilon _{t+1}=m_{t}q+(1-m_{t})(1-q),\)
-
9.
\(m_{t+1}=\epsilon _{t+1}+\theta _{t+1},\)
-
10.
\({\overline{H}}_{t+1}=\frac{1}{2}\epsilon _{t+1}h_{t+1}^{\mathrm{P,L}}+\frac{1}{2}(1-\epsilon _{t+1})h_{t+1}^{\mathrm{R,L}}+\frac{1}{2}(1-\epsilon _{t+1})h_{t+1} ^{\mathrm{P,H}}+\frac{1}{2}\epsilon _{t+1}h_{t+1}^{\mathrm{R,H}},\)
-
11.
\(y_{t+1}^{\mathrm{P}}=\epsilon _{t+1}(2-\epsilon _{t+1})h_{t+1}^{\mathrm{P,L}}+\theta _{t+1}(2-2\epsilon _{t+1}-\theta _{t+1})h_{t+1}^{\mathrm{R,L}}+(1-\epsilon _{t+1} -\theta _{t+1})^{2}h_{t+1}^{\mathrm{P,H}},\)
-
12.
\(y_{t+1}^{\mathrm{R}}=\left( 1-(\epsilon _{t+1}+\theta _{t+1})^{2}\right) h_{t+1} ^{\mathrm{R,L}}+\theta _{t+1}(\theta _{t+1}+2\epsilon _{t+1})h_{t+1}^{\mathrm{P,H}}+\epsilon _{t+1}^{2}h_{t+1}^{\mathrm{R,H}},\)
-
13.
\({\overline{y}}_{t+1}=\frac{1}{2}y_{t+1}^{\mathrm{P}}+\frac{1}{2}y_{t+1}^{\mathrm{R}}.\)
Step 3
If \(\big |\frac{{\overline{y}}_{t+1}}{{\overline{y}}_{t}}-1\big |\) is sufficiently small, we stop the iterative calculation. If not, we return to step 2.
Rights and permissions
About this article

Cite this article
Uchida, Y. Education, social mobility, and the mismatch of talents. Econ Theory 65, 575–607 (2018). https://doi.org/10.1007/s00199-016-1027-7
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00199-016-1027-7