
Abstract
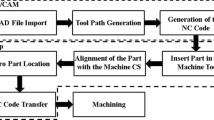
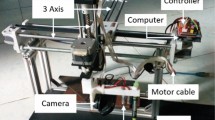
In high-speed machining, it is of key importance to avoid any collision between the machine tool and the machining set-up. If the machining set-up has not been assembled correctly by the operator and does not conform to the 3D CAD model used to compute the 3D trajectory sent to the machining unit, such collisions may occur. This paper presents a new chain-processing-based computer vision system to automatically avoid collision between tool and machining set-up components by checking that the actual machining set-up is in conformity with the desired 3D CAD model used to generate the tool trajectory. This computer vision system utilizes a single camera to automatically check conformity before the start of the machining operation. The proposed solution was tested in different kinds of machining set-ups, and each step of the proposed chain was evaluated. The results show the robustness of the solution for different kinds of machining set-ups.
Similar content being viewed by others

References
Ahmad R, Tichadou S, Hascoët J-Y Integration of vision based image processing for multi-axis CNC machine tool safe and efficient trajectory generation. International Journal of Machine Engineering 10(4)
Zhang X, Tsang W-M, Kazuo Y, Masahiko M (2013) A study on automatic on-machine inspection system for 3D modeling and measurement of cutting tools. J Intell Manuf 24(1):71–86
Zhang X, Tian X, Kazuo Y (2009) On-machine 3D vision system for machining setup modeling. Int J Adv Manuf Technol 48(1–4):251–265
Zhang X, Tian X, Kazuo Y, Makoto F (2007) 3D reconstruction and pose determination of the cutting tool from a single view. In: ISVC (2)’07, pp 377–386
Rafael Grompone VG, Jeremie J, Jean-Michel M, Gregory R (2010) LSD: a fast line segment detector with a false detection control. IEEE Trans Pattern Anal Mach Intell 32:722–732
Burns J, Hanson A, Riseman E (1986) Extracting straight lines. IEEE Trans Pattern Anal Mach Intell 8(4):425–455
Deschenes F, Ziou D, Auclair-Fortier M-F (2004) Detection of lines, line junctions and line terminations. Int J Remote Sens 25(3):511–535
Grompone von Gioi R, Jakubowicz J, Morel J-M, Randall G (2010) LSD: a fast line segment detector with a false detection control. IEEE Trans Pattern Anal Mach Intell 32(4):722–732
Papari G, Petkov N, Regli WC (2011) Edge and line oriented contour detection: state of the art. Image Vis Comput 29:79–103
Hartley RI, Zisserman A Multiple view geometry in computer vision
Karabagli B, Simon T, Orteu J-J (2011) Détermination automatique du seuil de binarisation des modules des gradients par modélisation de leur histogramme. In: Proceedings of ORASIS 2011, Praz-sur-Arlym, France, pp 2–8
Beveridge J, Graves C, Lesher C Some lessons learned from coding the burns line extraction algorithm in the Darpa image understanding environment. Technical Report CS-96-125, Computer Science Dept. Colorado State Univ.
Duchenne O, Bach F, Kweon I-S, Ponce J (2011) A tensor-based algorithm for high-order graph matching. IEEE Trans Pattern Anal Mach Intell 33:2383–2395
Gori M, Maggini M, Sarti L (2005) Exact and approximate graph matching using random walks. IEEE Trans Pattern Anal Mach Intell 27(7):1100–1111
Wu Z, Leahy R (1993) An optimal graph theoretic approach to data clustering: theory and its application to image segmentation. IEEE Trans Pattern Anal Mach Intell 15(11):1101–1113
Leordeanu M, Hebert M (2005) A spectral technique for correspondence problems using pairwise constraints. In: International Conference of Computer Vision (ICCV), vol 2, pp 1482–1489
Grimson W, Lozano-Pérez T (1987) Localizing overlapping parts by searching the interpretation tree. IEEE Trans Pattern Anal Mach Intell 9(4):469–482
Gabriel RK, Sokal RR (1969) A new statistical approach to geographic variation analysis. Syst Zool 18 (3):259–278
Zhang J, Berg A, Maire M, Malik J SVM-KNN discriminative nearest neighbor classification for visual category recognition. Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition
Delaunay B (1934) Sur la sphère vide. A la mémoire de Georges Voronoï. Bulletin de l’Académie des Sciences de l’URSS 6:793–800
Liotta G (1996) Low degree algorithms for computing and checking gabriel graphs
Zhang J, Marszalek M, Lazebnik S, Schmid C (2007) Local features and kernels for classification of texture and object categories: a comprehensive study. Int J Comput Vis 73(2):213–238
Zass R, Shashua A (2008) Probabilistic graph and hypergraph matching, pp 1–8
Bouguet J-Y (2004) Camera calibration toolbox for matlab
Haralick R, Lee C, Ottenberg K, Nôlle M (1991) Analysis and solutions of the three point perspective pose estimation problem, pp 592–598
Horaud R, Monga O (1993) Vision par ordinateur, outils fondamentaux
Shi J, Jitendra M (2000) Normalized cuts and image segmentation. IEEE Trans Pattern Anal Mach Intell 22(8):888–905
Nacereddine N, Tabbone S, Ziou D, Hamami L (2009) L’algorithme EM et le modèle de mélanges de gaussiennes généralisées pour la segmentation d’images. Application au contrôle des joints soudés par radiographie, Conf. Traitement et Analyse de l’Information : Méthodes et Applications. pp 217–222
Otsu N (1979) A threshold selection method from gray-level histograms. IEEE Trans Syst Man Cybern 9 (1):62–66
Arcelli C, Lam K-M, Siu W-C (1985) Extraction of the Euclidean skeleton based on a connectivity criterion. Pattern Recogn 36:721–729
Bai X, Latecki L, Liu W-Y (2007) Skeleton pruning by contour partitioning with discrete curve evolution. IEEE Trans Pattern Anal Mach Intell 29(3):449–462
Bouguila N, Ziou D, Hammoud RI- (2007) A Bayesian non-gaussian mixture analysis: application to eye modeling. Conf Comput Vis Pattern Recognit, 2007:1–8
Petrovic N, Jovanov L, Pizurica A, Wilfried P (2008) Object tracking using naive Bayesian classifiers 5259:775–784
Terrades O, Valveny E, Tabbone S (2009) Optimal classifier fusion in a non-Bayesian probabilistic framework. Conf Comput Vis Pattern Recognit, 2007 31(9):1630–1644
Takagi T, Sugeno M (1985) Fuzzy identification of systems and its applications to modeling and control. IEEE Trans Syst Man Cybern 15:116–132
Karabagli B, Auclair-Fortier M-F, Simon T, Orteu J-J (2013) Depth map estimation from a single RGB image: principle and calibration, Séjour à l’Université de Sherbrooke, Québec, présenté au congrès de l’Ecole Doctorale EDSYS, Tarbes
Daniel P Peut-on extraire le relief d’une seule image ?, Ph.D. thesis, Institut de Recherche en Informatique de Toulouse (28 Janvier 2000)
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Karabagli, B., Simon, T. & Orteu, JJ. A new chain-processing-based computer vision system for automatic checking of machining set-up application for machine tools safety. Int J Adv Manuf Technol 82, 1547–1568 (2016). https://doi.org/10.1007/s00170-015-7438-y
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00170-015-7438-y