
Abstract
Because finite elements and density elements are separated in multi-resolution topology optimization (MTOP), a relatively fewer number of finite elements can be used, thereby significantly reducing computing cost in finite element analysis (FEA) during topology optimization. However, for large-scale problems, numerous design variables are still required to precisely represent the optimum topology. This causes a dominant computational burden in design optimization. In this paper, an efficient multi-resolution topology optimization (MTOP) using adaptive isosurface variable grouping (aIVG) is proposed to alleviate the above computational burden in topology optimization by grouping design variables of similar grouping criteria into a single grouped design variable. Adaptive isosurface variable grouping is performed according to the grouping criterion which can be calculated using design variables and their sensitivities. Numerical examples such as 2D and 3D compliance minimization, 2D compliant mechanism, 2D multiple displacement constraints, and 3D thermal compliance minimization demonstrate that the proposed MTOP-aIVG significantly reduces computation time in optimization by virtue of using a reduced number of design variables.































Similar content being viewed by others

References
Aage N, Andreassen E, Lazarov BS (2015) Topology optimization using PETSc: an easy-to-use, fully parallel, open source topology optimization framework. Struct Multidiscip Optim 51(3):565–572
Aage N, Lazarov BS (2013) Parallel framework for topology optimization using the method of moving asymptotes. Struct Multidiscip Optim 47(4):493–505
Allaire G, Jouve F, Toader A-M (2004) Structural optimization using sensitivity analysis and a level-set method. J Comput Phys 194(1):363–393
Amir O, Aage N, Lazarov BS (2014) On multigrid-CG for efficient topology optimization. Struct Multidiscip Optim 49(5):815–829
Andreassen E, Clausen A, Schevenels M, Lazarov BS, Sigmund O (2011) Efficient topology optimization in MATLAB using 88 lines of code. Struct Multidiscip Optim 43(1):1–16
Bruns TE, Tortorelli DA (2003) An element removal and reintroduction strategy for the topology optimization of structures and compliant mechanisms. Int J Numer Methods Eng 57(10):1413–1430
Clausen A, Andreassen E (2017) On filter boundary conditions in topology optimization. Struct Multidiscip Optim 56(5):1147–1155
Davis TA (2006) Direct methods for sparse linear systems. SIAM
Deaton JD, Grandhi RV (2014) A survey of structural and multidisciplinary continuum topology optimization: post 2000. Struct Multidiscip Optim 49(1):1–38
Dong G, Tang Y, Zhao YF (2019) A 149 line homogenization code for three-dimensional cellular materials written in MATLAB. J Eng Mater Technol 141(1):011005
Evgrafov A, Rupp CJ, Maute K, Dunn ML (2008) Large-scale parallel topology optimization using a dual-primal substructuring solver. Struct Multidiscip Optim 36(4):329–345
Gao H-H, Zhu J-H, Zhang W-H, Zhou Y (2015) An improved adaptive constraint aggregation for integrated layout and topology optimization. Comput Methods Appl Mech Eng 289:387–408
Groen JP, Langelaar M, Sigmund O, Ruess M (2017) Higher-order multi-resolution topology optimization using the finite cell method. Int J Numer Methods Eng 110(10):903–920
Guest JK, Asadpoure A, Ha S-H (2011) Eliminating beta-continuation from Heaviside projection and density filter algorithms. Struct Multidiscip Optim 44(4):443–453
Guo X, Zhang W, Zhong W (2014) Doing topology optimization explicitly and geometrically—a new moving morphable components based framework. J Appl Mech 81(8):081009
Gupta D, van der Veen G, Aragón A, Langelaar M, van Keulen F (2017) Bounds for decoupled design and analysis discretizations in topology optimization. Int J Numer Methods Eng 111(1):88–100
Gupta DK, Langelaar M, van Keulen F (2018) QR-patterns: artefacts in multiresolution topology optimization. Struct Multidiscip Optim 58(4):1335–1350
Gupta DK, van Keulen F, Langelaar M (2020) Design and analysis adaptivity in multiresolution topology optimization. Int J Numer Methods Eng 121(3):450–476
Holmberg E, Torstenfelt B, Klarbring A (2013) Stress constrained topology optimization. Struct Multidiscip Optim 48(1):33–47
Huang X, Xie Y-M (2010) A further review of ESO type methods for topology optimization. Struct Multidiscip Optim 41(5):671–683
Jang IG, Kwak BM (2006) Evolutionary topology optimization using design space adjustment based on fixed grid. Int J Numer Methods Eng 66(11):1817–1840
Jang IG, Kwak BM (2008) Design space optimization using design space adjustment and refinement. Struct Multidiscip Optim 35(1):41–54
Joo Y, Lee I, Kim SJ (2017) Topology optimization of heat sinks in natural convection considering the effect of shape-dependent heat transfer coefficient. Int J Heat Mass Transf 109:123–133
Joo Y, Lee I, Kim SJ (2018) Efficient three-dimensional topology optimization of heat sinks in natural convection using the shape-dependent convection model. Int J Heat Mass Transf 127:32–40
Kim IY, Kwak BM (2002) Design space optimization using a numerical design continuation method. Int J Numer Methods Eng 53(8):1979–2002
Kim JE, Jang G-W, Kim YY (2003) Adaptive multiscale wavelet-Galerkin analysis for plane elasticity problems and its applications to multiscale topology design optimization. Int J Solids Struct 40(23):6473–6496
Kim SY, Kim IY, Mechefske CK (2012) A new efficient convergence criterion for reducing computational expense in topology optimization: reducible design variable method. Int J Numer Methods Eng 90(6):752–783
Kim TS, Kim JE, Kim YY (2004) Parallelized structural topology optimization for eigenvalue problems. Int J Solids Struct 41(9–10):2623–2641
Kim YY, Yoon GH (2000) Multi-resolution multi-scale topology optimization—a new paradigm. Int J Solids Struct 37(39):5529–5559
Kosaka I, Swan CC (1999) A symmetry reduction method for continuum structural topology optimization. Comput Struct 70(1):47–61
Kreisselmeier G, Steinhauser R (1980) Systematic control design by optimizing a vector performance index. In: Computer aided design of control systems. Elsevier, Amsterdam, pp 113–117
Le C, Norato J, Bruns T, Ha C, Tortorelli D (2010) Stress-based topology optimization for continua. Struct Multidiscip Optim 41(4):605–620
Lee S, Kwak BM (2008) Smooth boundary topology optimization for eigenvalue performance and its application to the design of a flexural stage. Eng Optim 40(3):271–285
Li L, Khandelwal K (2014) Two-point gradient-based MMA (TGMMA) algorithm for topology optimization. Comput Struct 131:34–45
Liao Z, Zhang Y, Wang Y, Li W (2019) A triple acceleration method for topology optimization. Struct Multidiscip Optim 60(2):727–744
Lieu QX, Lee J (2017a) A multi-resolution approach for multi-material topology optimization based on isogeometric analysis. Comput Methods Appl Mech Eng 323:272–302
Lieu QX, Lee J (2017b) Multiresolution topology optimization using isogeometric analysis. Int J Numer Methods Eng 112(13):2025–2047
Liu K, Tovar A (2014) An efficient 3D topology optimization code written in Matlab. Struct Multidiscip Optim 50(6):1175–1196
Matsui K, Terada K (2004) Continuous approximation of material distribution for topology optimization. Int J Numer Methods Eng 59(14):1925–1944
Nguyen TH, Le CH, Hajjar JF (2017) Topology optimization using the p-version of the finite element method. Struct Multidiscip Optim 56(3):571–586
Nguyen TH, Paulino GH, Song J, Le CH (2010) A computational paradigm for multiresolution topology optimization (MTOP). Struct Multidiscip Optim 41(4):525–539
Nguyen TH, Paulino GH, Song J, Le CH (2012) Improving multiresolution topology optimization via multiple discretizations. Int J Numer Methods Eng 92(6):507–530
Nguyen TH, Song J, Paulino GH (2011) Single-loop system reliability-based topology optimization considering statistical dependence between limit-states. Struct Multidiscip Optim 44(5):593–611
Park J, Nguyen TH, Shah JJ, Sutradhar A (2019) Conceptual design of efficient heat conductors using multi-material topology optimization. Eng Optim 51(5):796–814
Park J, Sutradhar A (2015) A multi-resolution method for 3D multi-material topology optimization. Comput Methods Appl Mech Eng 285:571–586
Querin O, Steven G, Xie Y (1998) Evolutionary structural optimisation (ESO) using a bidirectional algorithm. Eng Comput 15(8):1031–1048
Rojas-Labanda S, Stolpe M (2015) Benchmarking optimization solvers for structural topology optimization. Struct Multidiscip Optim 52(3):527–547
Saad Y (2003) Iterative methods for sparse linear systems, 2nd Edition. SIAM
Sethian JA, Wiegmann A (2000) Structural boundary design via level set and immersed interface methods. J Comput Phys 163(2):489–528
Sigmund O (2001) A 99 line topology optimization code written in Matlab. Struct Multidiscip Optim 21(2):120–127
Sigmund O (2007) Morphology-based black and white filters for topology optimization. Struct Multidiscip Optim 33(4–5):401–424
Sigmund O, Maute K (2013) Topology optimization approaches. Struct Multidiscip Optim 48(6):1031–1055
Svanberg K (1987) The method of moving asymptotes—a new method for structural optimization. Int J Numer Methods Eng 24(2):359–373
Svanberg K (2002) A class of globally convergent optimization methods based on conservative convex separable approximations. SIAM J Optim 12(2):555–573
Verbart A, Langelaar M, Van Keulen F (2017) A unified aggregation and relaxation approach for stress-constrained topology optimization. Struct Multidiscip Optim 55(2):663–679
Wang F, Lazarov BS, Sigmund O (2011) On projection methods, convergence and robust formulations in topology optimization. Struct Multidiscip Optim 43(6):767–784
Wang S, Ed S, Paulino GH (2007) Large-scale topology optimization using preconditioned Krylov subspace methods with recycling. Int J Numer Methods Eng 69(12):2441–2468
Yang R, Chen C (1996) Stress-based topology optimization. Struct Optim 12(2–3):98–105
Zhang W, Yuan J, Zhang J, Guo X (2016) A new topology optimization approach based on moving morphable components (MMC) and the ersatz material model. Struct Multidiscip Optim 53(6):1243–1260
Acknowledgements
This research was supported by Energy Cloud R&D Program through the National Research Foundation of Korea (NRF) funded by the Ministry of Science, ICT (No. 2016006843) and the HSI (HyperSpectral Imaging) project of the Agency for Defense Development of the Republic of Korea. The authors also thank Krister Svanberg for providing the MATLAB MMA code.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that they have no conflict of interest.
Replication of results
MATLAB codes for the proposed method are uploaded on https://github.com/Jaeeun-Yoo/MTOP_aIVG.git. Overall concepts and algorithms can be validated through the example.
Additional information
Responsible Editor: Ole Sigmund
Publisher's note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Appendix. Details of MTOP formulation
Appendix. Details of MTOP formulation
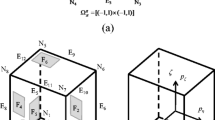
For a 2D quadrilateral element with 5 × 5 density variables (Fig. 32), a density element stiffness matrix using the Gauss-Legendre quadrature can be expressed as
where Ae is the area of a finite element in physical coordinate; m and n are the numbers of quadrature points in ξ and η coordinates, respectively; and wi and wj are the weighting coefficients at the ith and jth quadrature, respectively. Also, in Eq. (A1),
where pr is the rth coordinate value in the ξ axis; qs is the sth coordinate value in the η axis; G is the number of density elements in a finite element in each axis direction (5 in Fig. 32); ξi and ηj are the ith and jth quadrature position in ξ-η coordinate, respectively.

Relation between the finite element layer and density element layer: a density variables in one finite element and b node position in the isoparametric element
To improve the computational efficiency in the optimization loop, the element stiffness matrix can be re-expressed in terms of precomputed terms and density variables. This study utilizes the modified SIMP (Sigmund 2007), where the elastic stiffness is expressed as
where Emin is the minimum value of the Young’s modulus of the material; E0 is the original Young’s modulus; and p is a penalization constant which is typically set to 3. Then, using Eqs. (2), (A1), and (A3), the element stiffness matrix in MTOP can be expressed as
where
Cmin is the constitutive matrix for the minimum Young’s modulus Emin; C0 is the constitutive matrix for Young’s modulus E0; and ρde is the density of the dth density element which belongs to the eth finite element. Using the adjoint method, sensitivities of the objective and constraint functions with respect to the dth density variable (ρde) are given by
and
respectively.
Rights and permissions
About this article

Cite this article
Yoo, J., Jang, I.G. & Lee, I. Multi-resolution topology optimization using adaptive isosurface variable grouping (MTOP-aIVG) for enhanced computational efficiency. Struct Multidisc Optim 63, 1743–1766 (2021). https://doi.org/10.1007/s00158-020-02774-2
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00158-020-02774-2