
Abstract
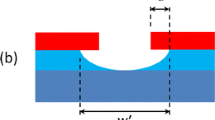
This paper studies the hybrid microassembly of 300 μm (L) × 300 μm (W) × 30 μm (H) microchips on sharp edged patterns with different edge heights. Hybrid microassembly combines the robotic pick-and-place technique and the droplet based surface tension driven self-assembly technique, where the robotic pick-and-place handling tool is used for coarse positioning and the droplet self-assembly technique is used for high-accuracy self-alignment. Spreading of the liquid outside the pattern leads to failure in self-alignment. Sharp edge on a solid surface is known for enabling contact line pinning according to Gibbs inequalities, which prohibits spreading of the liquid. Topological patterns featured with the sharp edge can be used as the receptor site for surface tension driven self-alignment. However, it is unclear how high the sharp edged pattern should be to achieve successful self-alignment in hybrid microassembly. In this paper, sharp edged topological patterns with five different edge heights: 70 nm, 140 nm, 280 nm, 540 nm and 1,050 nm, have been fabricated and tested with water to investigate the influence of the edge height on the hybrid microassembly. The experimental results indicate the edge height affects both the contact line pinning and the self-alignment process. Water droplet can successfully pin at the edge of patterns higher than 280 nm. Self-alignment can reach 100 % success rate on the patterns with edge height of 1 μm when the initial placement error is below 150 μm.














Similar content being viewed by others
References
Sariola V, Zhou Q, Koivo HN (2008) Hybrid microhandling: a unified view of robotic handling and self-assembly. J Micro-Nano Mechatron 4(1–2):5–16
Sariola V, Jääskeläinen M, Zhou Q (2010) Hybrid microassembly combining robotics and water droplet self-alignment. IEEE Trans Robot 26(6):965–977
Assembleon Mx100_Series_leaflet, 2012. [Online]. Available: http://www.assembleon.com/images/Userdata/Mirae/Mx100_Series_leaflet.pdf
Knuesel RJ, Jacobs HO (2010) Self-assembly of microscopic chiplets at a liquid-liquid-solid interface forming a flexible segmented monocrystalline solar cell. Proc Natl Acad Sci U S A 107(3):993–998
Oliver J, Huh C, Mason S (1982) Resistance to spreading of liquids by sharp edges. Colloids Surf 4:1–15
Extrand CW (2005) Modeling of ultralyophobicity: suspension of liquid drops by a single asperity. Langmuir 21(23):10370–10374
Extrand CW, Moon SI (2008) Contact angles on spherical surfaces. Langmuir 24(17):9470–9473
Zhang J, Gao X, Jiang L (2007) Application of superhydrophobic edge effects in solving the liquid outflow phenomena. Langmuir 23(6):3230–3235
Kalinin YV, Berejnov V, Thorne RE (2009) Contact line pinning by microfabricated patterns: effects of microscale topography. Langmuir 25(9):5391–5397
Chang B, Routa I, Sariola V, Zhou Q (2011) Self-alignment of RFID dies on four-pad patterns with water droplet for sparse self-assembly. J Micromech Microeng 21(9):095024
Chang B, Jaaskelainen M, Zhou Q (2011) Hybrid microassembly of chips on low precision patterns assisted by capillary self-alignment. In: IEEE/RSJ International Conference on Intelligent Robots and Systems. pp. 907–912
Chang B, Sariola V, Aura S, Ras RHA, Klonner M, Lipsanen H, Zhou Q (2011) Capillary-driven self-assembly of microchips on oleophilic/oleophobic patterned surface using adhesive droplet in ambient air. Appl Phys Lett 99(3):034104
Shah A, Chang B, Suihkonen S, Zhou Q, Lipsanen H (2013) Surface-tension-driven self-alignment of microchips on black-silicon-based hybrid template in ambient air. J Microelectromech Syst 22:1–7
Tsai CG, Hsieh CM, Yeh JA (2007) Self-alignment of microchips using surface tension and solid edge. Sensors Actuators A Phys 139(1–2):343–349
Chang B, Sariola V, Jääskeläinen M, Zhou Q (2011) Self-alignment in the stacking of microchips with mist-induced water droplets. J Micromech Microeng 21(1):015016
Chang B (2013) Hybrid microassembly with surface tension driven self-alignment: handling strategies and micro-fabricated patterns. Doctoral Thesis, Aalto University
de Gennes PG (1985) Wetting: statics and dynamics. Rev Mod Phys 57:827–863
Huh C, Mason SG (1977) Effects of surface roughness on wetting (theoretical). J Colloid InterfaceSci 60:11–38
Acknowledgments
This paper reports work undertaken in the context of the project “FAB2ASM: Efficient and Precise 3D Integration of Heterogeneous Microsystems from Fabrication to Assembly”. FAB2ASM is a collaborative project supported by the European Commission in the 7th Framework Programme (Grant Agreement n°260079). This work was also supported by the Academy of Finland under Grant 134206 and 133806 Programmable and Spatially Multi-scale Self-assembly of Microcomponents, MUSA (2010-2013).
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Chang, B., Shah, A., Routa, I. et al. Low-height sharp edged patterns for capillary self-alignment assisted hybrid microassembly. J Micro-Bio Robot 9, 1–10 (2014). https://doi.org/10.1007/s12213-014-0073-0
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s12213-014-0073-0