
Abstract
Coordination of birds in large flocks is amazing, especially, since individual birds only interact with a few neighbors (the so-called ‘influential neighbours’). Yet, empirical data show that fluctuations of velocity and speed of different birds are correlated beyond the influential neighbours and are correlated over a larger distance in a larger flock. This correlation between the correlation length of velocity or speed and flock size was found to be linear, called a scale-free correlation. It depends on the way individuals interact in the flock, for instance, on the number of influential neighbours and speed control. It is unknown however, how exactly the number of influential neighbours affects this scale-free correlation. Recent empirical data show that different degrees of control of speed affect the scale-free correlation for speed fluctuations. Theoretically, based on statistical mechanics, it is predicted that at very high speed control, the correlation is no longer scale-free but saturates at a certain correlation length and this hampers coordination in flocks. We study these issues in a model, called StarDisplay, because its behavioural rules are biologically inspired and many of its flocking patterns resemble empirical data. Our results show that the correlation length of fluctuations of velocity as well as speed correlate with flock size in a scale-free manner. A higher number of influential neighbours causes a diminishing increase of the slope of the scale-free correlation with velocity, resulting thus in flocks that coordinate more uniformly. Similar to recent empirical data higher speed control reduces the correlation length of speed fluctuations in our model. As predicted theoretically, at very high speed control the model generates a non-scale free correlation, and although there are still flocks, they are in the process of disintegrating.





Similar content being viewed by others
References
Davis, M.J.: The coordinated aerobatics of dunlin flocks. Anim. Behav. 28(3), 668–673 (1980)
Carere, C., Montanino, S., Moreschini, F., et al.: Aerial flocking patterns of wintering starlings, Sturnus vulgaris, under different predation risk. Anim. Behav. 77, 101–107 (2009)
Clergeau, P.: Flocking behavior of starlings (sturnus vulgaris) during the day: a gradual gathering to the roost. J. Ornithol. 131(4), 458–460 (1990)
Feare, C.J.: The Starling. Oxford University Press, Oxford (1984)
Brodie, J.: The flight behaviour of starlings at a winter roost. Br. Birds 69, 51–60 (1976)
Eastwood, E., Isted, G.A., Rider, G.C.: Radar ring angles and the roosting behaviour of starlings. Proc. R. Soc. Lond. B 156(963), 242–267 (1962)
Ballerini, M., Cabibbo, N., Candelier, R., et al.: Empirical investigation of starling flocks: a benchmark study in collective animal behaviour. Anim. Behav. 76(1), 201–215 (2008)
Hildenbrandt, H., Carere, C., Hemelrijk, C.K.: Self-organized aerial displays of thousands of starlings: a model. Behav. Ecol. 21(6), 1349–1359 (2010). doi:10.1093/beheco/arq149
Cavagna, A., Cimarelli, A., Giardina, I., et al.: Scale-free correlations in starling flocks. PNAS 107(26), 11865–11870 (2010)
Ballerini, M., Cabibbo, N., Candelier, R., et al.: Interaction ruling animal collective behaviour depends on topological rather than metric distance: evidence from a field study. PNAS 105(4), 1232–1237 (2008)
Lukeman, R., Li, Y., Edelstein-Keshet, L.: Inferring individual rules from collective behavior. PNAS 107(28), 12576–12580 (2010)
Nagy, M., Ákos, Z., Biro, D., Vicsek, T.: Hierarchical group dynamics in pigeon flocks. Nature 464(7290), 890–893 (2010)
Inada, Y., Kawachi, K.: Order and flexibility in the motion of fish schools. J. Theor. Biol. 214(3), 371–387 (2002)
Mirabet, V., Pierre, F., Christophe, L.: Factors affecting information transfer from knowledgeable to naive individuals in groups. Behav. Ecol. Sociobiol. 63(2), 159–171 (2008)
Lemasson, B.H., Anderson, J.J., Goodwin, R.A.: Collective motion in animal groups from a neurobiological perspective: the adaptive benefits of dynamic sensory loads and selective attention. J. Theor. Biol. 261(4), 501–510 (2009)
Bialek, W., Cavagna, A., Giardina, I., et al.: Social interactions dominate speed control in poising natural flocks near criticality. Proc. Natl. Acad. Sci. USA 111(20), 7212–7217 (2014)
Hemelrijk, C.K., Hildenbrandt, H.: Some causes of the variable shape of flocks of birds. PLoS One 6(8), e22479 (2011)
Hemelrijk, C.K., Hildenbrandt, H.: Schools of fish and flocks of birds: their shape and internal structure by self-organization. Interface Focus 2(6), 726–737 (2012)
Couzin, I.D., Krause, J., James, R., Ruxton, G.D., Franks, N.R.: Collective memory and spatial sorting in animal groups. J. Theor. Biol. 218(1), 1–11 (2002)
Huth, A., Wissel, C.: The simulation of the movement of fish schools. J. Theor. Biol. 156(3), 365–385 (1992)
Huth, A., Wissel, C.: The simulation of fish schools in comparison with experimental data. Ecol. Model. 75(76), 135–145 (1994)
Kunz, H., Hemelrijk, C.K.: Artificial fish schools: collective effects of school size, body size, and body form. Artif. Life 9(3), 237–253 (2003)
Hemelrijk, C.K., Hildenbrandt, H.: Self-organized shape and frontal density of fish schools. Ethology 114, 245–254 (2008)
Reuter, H., Breckling, B.: Selforganization of fish schools: an object-oriented model. Ecol. Model. 75, 147–159 (1994)
Norberg, U.M.: Vertebrate Flight: Mechanics, Physiology, Morphology, Ecology and Evolution, vol. 27. Springer, New York (1990)
Videler, J.J.: Avian Flight. Oxford University Press, Oxford (2005)
Ward, S., Mueller, U., Rayner, J.M.V., Jackson, D.M., Nachtigall, W., Speakman, J.R.: Metabolic power of european starlings sturnus vulgaris during flight in a wind tunnel, estimated from heat transfer modelling, doubly labelled water and mask respirometry. J. Exp. Biol. 207(Pt 24), 4291–4298 (2004)
Pomeroy, H., Heppner, F.: Structure of turning in airborne rock dove (Columba livia) flocks. Auk 109(2), 256–267 (1992)
Gillies, J.A., Thomas, A.L.R., Taylor, G.K.: Soaring and manoeuvring flight of a steppe eagle aquila nipalensis. J. Avian Biol. 42(5), 377–386 (2011)
Selous, E.: Thought Transference (or what?) in Birds. Constanble and Company Ltd., London (1931)
Reynolds, C.W.: Flocks, herds and schools: a distributed behavioral model. In: Proceedings of the 14th annual conference on computer graphics and interactive techniques. Vol 21. ACM, New York, pp. 25–34 (1987)
Gillies, J.A., Bacic, M., Yuan, F.G., Thomas, A.L.R., Taylor, G.K.: Modeling and identification of steppe eagle (aquila nipalensis) dynamics. AIAA Modeling and Simulations Technologies Conference and Exhibit. American Institute of Aeronautics and Astronautics, Honolulu, Hawaii, pp. 18–21 (2008)
Taylor, G.K., Bacic, M., Carruthers, A.C., Gillies, J., Ozawa, Y., Thomas, A.L.R.: Flight control mechanisms in birds of prey. 45th AIAA Aerospace Sciences Meeting and Exhibit. American Institute of Aeronautics and Astronautics, Reno, Nevada, pp. 8–11 (2007)
Viscido, S.V., Parrish, J.K., Grunbaum, D.: The effect of population size and number of influential neighbors on the emergent properties of fish schools. Ecol. Model. 183(2–3), 347–363 (2005)
Niizato, T., Gunji, Y.: Fluctuation-driven flocking movement in three dimensions and scale-free correlation. PloS One 7(5), e35615 (2012)
Kunz, H., Hemelrijk, C.K.: Simulations of the social organization of large schools of fish whose perception is obstructed. Appl. Anim. Behav. Sci. 138(3–4), 142–151 (2012)
Kunz, H., Hemelrijk, C.K.: Simulations of the social organization of large schools of fish whose perception is obstructed. Appl. Anim. Behav. Sci. 138(3–4), 142–151 (2012)
Zheng, M., Kashimori, Y., Hoshino, O., Fujita, K., Kambara, T.: Behavior pattern (innate action) of individuals in fish schools generating efficient collective evasion from predation. J. Theor. Biol. 235(2), 153–167 (2005)
Hemelrijk, C.K., Kunz, H.: Density distribution and size sorting in fish schools: an individual-based model. Behav. Ecol. 16(1), 178–187 (2005)
Hamilton, W.D.: Geometry for the selfish herd. J. Theor. Biol. 31, 295–311 (1971)
Hemelrijk, C.K., Wantia, J.: Individual variation by self-organisation: a model. Neurosci. Biobehav. Rev. 29(1), 125–136 (2005)
Acknowledgments
We are grateful for the grants that have been supporting this research, Hemelrijk’s Startup Grant of her Rosalind Franklin Fellowship and her Grant in the European Project of the 7th framework, StarFlag for the work by Hanno Hildenbrandt. We thank the self-organization group for regular discussions.
Author information
Authors and Affiliations
Corresponding author
Electronic supplementary material
Below is the link to the electronic supplementary material.
Supplementary material 2 (wmv 6911 KB)
Supplementary material 3 (wmv 7645 KB)
Supplementary material 4 (wmv 10700 KB)
Supplementary material 5 (wmv 7153 KB)
Appendix: Details of Behavioural Rules
Appendix: Details of Behavioural Rules
Here, we present the details of the behavioral rules as described in earlier papers [8, 17]. Each individual is characterised by its mass, \(m\), its speed, \(v\), and its location, \({\mathbf {p}}\). Its orientation in space is given by its local coordinate system \(({\mathbf {e}}_x ,{\mathbf {e}}_y ,{\mathbf {e}}_z )\). Following the model by Reynolds [31], its orientation is indicated by its forward direction, \({\mathbf {e}}_x \), its sideward direction, \({\mathbf {e}}_y \), and its upward direction, \({\mathbf {e}}_z \), which it changes by rotating around these three principal axes (roll, pitch and yaw).
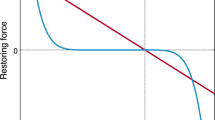
To augment the control over the speed of the individuals that is implicit to the aerodynamic equations (18 and 20), a force, \({\mathbf {f}}_{\tau _i }\) Eq. (3) is added that brings an individual back to its cruise speed \(v_0\) after it has deviated from it [23].
where \(w_{sp} \) is a scaling factor, \(m\) is the mass of the individual \(i\) and \(v_0 \) its cruise speed, \(v_i\) is its speed, and \({\mathbf {e}}_{x_i } \) its forward direction.
To make each individual interact with a specific constant number of its closest neighbours (i.e. topological range), each individual \(i\) in the model adjusts its metric interaction range, \(R_i (t)\) [23] following Eqs. (4) and (5).
where \(\Delta u\) is the reaction time, \(s\) is an interpolation factor, \(R_{\max }\)is the maximal metric interaction range, \(N_i (t)\) is the neighbourhood of individual \(i\) at time \(t\), i.e. the set of neighbours of an individual \(i\) which is composed of \(\left| {N_i (t)} \right| \) neighbours from the total flock, \(n_c\) is the fixed number of topological influential neighbours it strives to have and \(d_{ij} \) is the distance between individual \(i\) and \(j\) given by \(\left\| {{\mathbf {p}}_j -{\mathbf {p}}_i } \right\| \) where \({\mathbf {p}}_i \) gives the position of an individual \(i\). Thus, the radius of interaction at the next step in reaction-time, \(R_i (t+\Delta u)\), increases whenever the number of influential neighbours \(\left| {N_i (t)} \right| \) is smaller than the targeted number \(n_c \), and it is decreased if it is larger than that; it remains as before if \(\left| {N_i (t)} \right| \) equals \(n_c \). Here \(R_i \) can neither decrease below the hard sphere in which individuals are maximally avoiding each other \(r_h\) Eq. (6) nor increase beyond \(R_{\max }\). \(s\), the interpolation factor, determines the step-size of the changes and thus, the variance of the number of actual influential neighbours.
As to separation, individual \(i\) is led by a force \({\mathbf {f}}_{{\mathbf {s}}_{\mathbf {i}} }\)to move in the opposite direction of the average direction of the locations of the \(\left| {N_i (t)} \right| \) others in its neighbourhood. Following others [19, 38], we have omitted the blind angle at the back Eq. (6). We gave individuals a hard sphere with radius \(r_h \) as mentioned above, in which they avoid each other maximally Eq. (6). Outside the hard sphere, but inside the radius of separation \(r_{sep} \), the degree of avoidance of others decreases with the distance to the neighbour following a halved Gaussian, \(g(x)\), with \(\sigma \) the standard deviation of the Gaussian set so that at the border of the separation zone the force is almost zero, \(g(r_{sep} )=0.01\) Eq. (6).
Here, \(\left| {N_i (t)} \right| \) is the number of individuals in the neighbourhood of interaction Eq. (5) and \(d_{ij} \) is the distance from individual \(i\) to individual\(j\). The direction from individual \(i\) to individual \(j\) is specified by the unit vector \({\mathbf {d}}_{ij} =({\mathbf {p}}_j -{\mathbf {p}}_i )/\left\| {{\mathbf {p}}_j -{\mathbf {p}}_i } \right\| \) and \(w_s \) is the weighting factor for separation (Tab. 1).
As to cohesion, individual \(i\) is attracted by a force \({\mathbf {f}}_{{\mathbf {c}}_{\mathbf {i}} }\) to the direction of the centre of mass (i.e. the average \(x\), \(y\), \(z\) position) of the group of \(\left| {N_i^*(t)} \right| \) individuals located in its topological neighbourhood, but not in its blind angle, in a way similar to models of others [19, 20, 22, 24, 39]. Here, \(w_c \) is the weighing factor for cohesion Eq. (7) (Table 1). Within the radius of the hard sphere\(r_h \), we ignore cohesion with others Eq. (7). To represent fear of predators [40] and build a sharp boundary of the flock [7], we make individuals cohere more strongly when they are at the border of the flock than in its interior by multiplying the force of cohesion by a factor indicating the degree to which an individual is peripheral Eqs. (7) and (9). This factor, called ‘centrality’ in the group, \(C_i (t)\), we calculate as the length of the average vector of the direction of all its neighbours \(\beta _{in} \) relative to the individual \(i\) [41]. A high value indicates that the individual is peripheral; a lower value indicates that it is located more in the centre of the group. The ‘neighbouring’ individuals are all \(\left| {N_G (t)} \right| \) individuals in a radius of twice the actual perceptual distance of the individual \(i\) Eq. (9).
As regards its alignment behaviour Eq. (10), individual \(i\) feels a force, \({\mathbf {f}}_{a_{\mathbf {i}} }\), to align with the average forward direction of its \(\left| {N_i^*(t)} \right| \) interaction neighbours (the same neighbours as to whom it is attracted).
Here, \({\mathbf {e}}_{{\mathbf {x}}_{\mathbf {i}} }\) and \({\mathbf {e}}_{x_j }\) are the vectors indicating the forward direction of individuals direction of individuals \(i\) and \(j\) and \(w_a\) is the fixed weighting factor for alignment (Table 1).
The ‘social force’ is the sum of these three forces Eq. (11).
Individuals fly at a similar height above the sleeping site like real starlings [2], because we made them experience both in a horizontal and vertical direction a force of attraction \({\mathbf {f}}_{Roost} \) to the ‘roosting area’ Eqs. (12, 13, 14). The strength of the horizontal attraction, \({\mathbf {f}}_{RoostH} \), is greater, the more radially it moves away from the roost; it is weaker if it is already returning. The strength is calculated using the dot product, i.e. the angle between the forward direction of individual \(i\), \({\mathbf {e}}_{{\mathbf {x}}_{\mathbf {i}} } \), and the horizontal outward-pointing normal \({\mathbf {n}}\) of the boundary. The range of the result [\(-1\)..1] is transformed to [0..1] by halving the dot product and summing it with a 1/2. The actual direction of the horizontal attraction force to the roost is given by \({\mathbf {e}}_{y_{\mathbf {i}} } \)which is the individual’s lateral direction. The sign in Eq. (13) is chosen to reduce the outward heading. The actual direction of the horizontal attraction force is given by \({\mathbf {e}}_{y_{\mathbf {i}} } \)which is the individual’s lateral direction. Vertical attraction, \({\mathbf {f}}_{RoostV} \), is proportional to the vertical distance from the preferred height \(z_0 \) above the roost (arbitrarily called the zero level). Here \({\mathbf {z}}\) is the vertical unit vector. \(w_{RoostH} \) and \(w_{RoostV} \) are fixed weighting factors.
The random force indicates unspecified stochastic influences Eq. (15) with \({\mathbf {\zeta }}\) being a random unit vector from a uniform distribution and \(w_\zeta \) being a fixed scaling factor. The sum of the social force, the forces that control speed and ranging and the random force is labeled as ‘steering force’ Eq. (16).
Physics of flight in the model follows the standard equations of fixed wing aerodynamics which link the lift \(L,\) the drag \(D\) and the thrust \(T\) produced by a bird to attain its current speed \(v\) Eq. (17):
where \(\rho \) is the density of the air and \(S\) represents the wing area of the bird (of identical size for all birds). The quotient of \(C_L \) and \(C_D \) of the dimensionless lift and drag coefficients in the model is fixed, resembling the almost fixed ratio in reality [25]. When a bird is flying horizontally while maintaining a constant cruise speed \(v_0 \) its lift balances its weight \(mg\) (mass times gravity) and its thrust balances its drag Eq. (18). Division of \(L\) by \(L_0 \) and of \(D\) by \(L\) in Eqs. (17) and (18) yields Eq. (19) in which the lift and the drag only depend on the actual speed.
Gravity is directed towards the global ‘down’ direction, \({\mathbf {g}}=(0,0,-g)\), the lift upwards operates towards the local ‘up’ direction \({\mathbf {e}}_z \) of the bird and the drag is pointing in the direction opposite to its actual ‘forward’ direction \({\mathbf {e}}_x \). Thus, the flight forces are:
Note that the force \({\mathbf {D}}_{\mathbf {i}} +{\mathbf {T}}_0 \) counteracts deviations from cruise speed. This speed control remains if we set \(w_{sp}\) to zero (3).
Real birds roll into the turn in order to make turns [26]. Because in the absence of external influence we assume that birds ‘intend’ to fly with their wings at a horizontal level in order to move straightforward, we give the model-birds a tendency to roll back. To represent banked turns, we first calculate the degree to which individuals want to turn, i.e. their lateral acceleration, \({\mathbf {a}}_l \), which is exerted by the steering force. Banking implies that the individual rolls around its forward axis in the direction of its lateral acceleration, \({\mathbf {a}}_l \). The lateral acceleration follows the first law of Newton (\({\mathbf {F}}=m\cdot {\mathbf {a}})\),
where \(\beta _i\) is the actual banking angle, \(w_{\beta _{in} }\) and \(w_{\beta _{out} }\), respectively are the weights for rolling in and out the curve of turning, \(\Delta t\) is the update time and \(\beta _{in}\) and \(\beta _{out}\) are the angles over which an individual intends to move inwards and outwards. The tendency to roll into the turn increases with the strength of the tendency to turn sideways, which is due to the urge to coordinate with its topological neighbours (via attraction, alignment and avoidance) and to stay above the roost Eq. (22). Once an individual has banked in the model, its tendency to roll back to the horizontal is proportional to its actual banking angle Eq. (23). The actual banking angle Eq. (24) is the sum of the current angle and the tendencies to roll-in and to roll-out. The ratio of \(w_{\beta _{in} } \) and \(w_{\beta _{out} } \) determines the roll rate. Note that by banking the individual creates a centripetal force at the cost of lift. Consequently it temporarily tends to move downwards.
After summing the forces of steering and flying, we use Euler integration to calculate the position and velocity at the end of each time-step \(\Delta t\):
where \({\mathbf {v}}_i \) is the velocity of individual \(i\), \(m\) its mass, \({\mathbf {p}}_i \) its location, and \(\Delta t\) is the update time. For the default values, see Table 1.
Rights and permissions
About this article

Cite this article
Hemelrijk, C.K., Hildenbrandt, H. Scale-Free Correlations, Influential Neighbours and Speed Control in Flocks of Birds. J Stat Phys 158, 563–578 (2015). https://doi.org/10.1007/s10955-014-1154-0
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10955-014-1154-0