
Abstract
SAFARI is an imaging Fourier Transform Spectrometer for 35–200 μm under development for flight on the Japanese IR-satellite SPICA (2018). The 3.25 m diameter actively cooled telescope (<6K) will provide a sky background limited signal, which implies that detectors will need to have an NEP of \(3.5 \cdot10^{-19}\ \mbox{W/}\sqrt{\mathrm{Hz}}\) in order not to be limiting the sensitivity. The instrument will utilize three TES-based detector arrays, covering the 2×2 arcmin field-of-view in three octaves of wave length. This contribution will present an overview of the detector sub-system, i.e.: the detector arrays and radiation coupling, the focal plane assembly, the amplification chain and the frequency-domain- multiplexed electronics. The focus will be on the implications on the system design of the readout under the stringent power dissipation, heat load, and weight limitations.
Similar content being viewed by others
1 Introduction
The SPICA mission, as proposed by JAXA, will provide a 3.25 m telescope which is actively cooled to below 6 K. SAFARI is one of the proposed instruments in the SPICA focal plane, and consists of an imaging Fourier transform spectrometer (FTS) with transition-edge-sensor (TES)-based imaging detector arrays with a noise floor below the sky background [5]. The optical beam will be split in three octaves, i.e. 34–60, 60–100, and 110–210 μm, or short (SW), medium (MW), and long wavelength (LW), respectively. The number of pixels in each of the bands will be 61×61 (SW), 34×34 (MW), and 18×18 (LW). The required NEPs of the three wavelength bands in the same order are 4.5, 3.6, and 3.5⋅10−19 W/\(\sqrt {\mathrm{Hz}}\). The bandwidth per pixel will be at most 150 Hz, and at least 40, 28, and 13 Hz to match the intended FTS scanning speed. The optical coupling will be by impedance matched absorbers which are well coupled to the TES, on which the incoming radiation is focussed by pairs of multi-mode pyramidal horns and a non-resonating cavities with an efficiency of at least 50%. A more elaborate overview of the SAFARI instrument can be found elsewhere [1].
This paper focusses on the design considerations of the imaging array readout and the focal plane assemblies, which are driven by the stringent power limitations, both electrical and with respect to cooling.
2 SAFARI Readout Chain
The design of the SAFARI readout chain has been optimized for power consumption and insensitivity to electro magnetic interference (EMI). The power consumption optimization, both for electrical power and cooling power, is vital for operation in the space environment. The EMI insensitivity optimization is crucial as the detectors are sensitive to power levels of the order of 10−19 W, while the signals need to be transported between 4 K and the room temperature (RT) electronics through cables with a length of in total ∼15 m, while the data downlink transmitter will be active during observations.
Frequency domain multiplexing (FDM) has been chosen as the multiplexing method for SAFARI, to minimize the static heat load by wiring on the 4 K level, as this is a design (and therefore power) driver for the coolers. Furthermore, potential 1/f noise issues originating from the SQUID amplifier chain is avoided in FDM, as the signals are amplitude modulated on carrier frequencies above their 1/f corner frequencies.
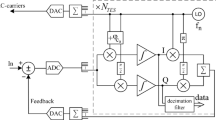
In this FDM implementation the TES-based bolometers are biased by sinusoidal voltages with an individual frequency per pixel. The SQUID current amplifier is sitting in a branch which is common to all bias circuits, the so-called current summing point. In series with each pixel an LC bandpass filter is necessary to ensure full pixel separation in frequency space. A block diagram of the readout chain is shown in Fig. 1, and an overview of the electrical properties and FDM dimensions is given in Table 1.

(Color online) Cross section of the focal plane assembly layout (left), and a block diagram of the readout chain (right)
The lower operating frequency has been set at f min=1 MHz, driven by the maximum acceptable size of the LC resonators (f min∝(area)−2). The maximum operating frequency has been set at 3 MHz, driven by power dissipation constraints in the room temperature electronics. The frequency space separation has been minimized to 12.5 kHz, and is limited by a combination of the accuracy limits in the LC bandpass filters [2], and cross talk requirements which demand a minimum ratio between the frequency separation and the bandwidth (or the response time) per pixel. Combining all factors leads to a multiplexing factor of (3 MHz−1 MHz)/12.5 kHz=160 pixels/SQUID channel.
The SQUID chain consists of a first stage SQUID at base temperature, who’s amplification factor is limited by the available cooling power (2 nW/SQUID). A second stage SQUID with a differential output stage will be located at 1.7 K, and is optimized for maximum power gain, in order to increase the signal levels above the significant EMI levels induced on the 15 m length of wiring between 4 K and 300 K. As the SQUID amplified signals are still marginal with respect to the expected EMI levels, a semiconductor-based low noise amplifier (LNA) is projected at the shortest possible distance from 1.7 K within the cooling constraints, which is at a distance of 6 m at a temperature of 135 K.
The dynamic range D=ϕ max/ϕ n in a DC SQUID is practically limited to \(D \sim10^{6} \sqrt{\mathrm{Hz}}\). In the SAFARI case the heat load constraints limit the achievable dynamic range in the first stage SQUID to \({\sim}5\cdot 10^{5} \sqrt{\mathrm{Hz}}\) as the power consumption in a SQUID P scales as P∝D 2. The effective dynamic range of SQUID (chain) has been enhanced to \(4 \cdot 10^{6} \sqrt{\mathrm{Hz}}\) by applying a loop gain of >50 in a baseband feedback loop [3].
3 Focal plane assembly
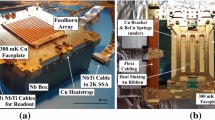
The heart of the SAFARI instrument consists of the TES-based bolometer arrays, the LC-bandpass filters, and the SQUIDs. For each of the three wavelength bands there is a so-called focal plane assembly (FPA), which houses one bolometer array, its SQUID amplifiers, its band-pass LC filters, and its magnetic, optical and electro magnetic interference (EMI) shielding at 50 mK and 1.7 K, and EMI filtering for the signals wires and cold fingers entering the 1.7 K box.
In order to make a compact FPA, the detector and LC-filter chips will be positioned on the faces of cubicle structure, as sketched in Fig. 1. This topology requires flexible interconnections to step over the 90 degrees corners of the cube. We are developing Nb wiring on a thin polyimide substrate, to accommodate the 90 degree angle. The flexible wiring will be connected to the LC filter chip using a standard indium bump bond process. The latter process, which requires reflowing the bumps at 300°C, is compatible with the LC-filter processing steps.
3.1 Bolometer—Filter Interconnection
The bolometer arrays, LC filters, and SQUIDs have to be produced independently, for reasons of incompatible processing steps and yield. The fact that the focal plane assemblies need to be space qualified puts a strong incentive on designing the FPA components such that individual space qualification of the components can be performed before the final assembly of a whole focal plane assembly.
As each pixel requires an individual LC filter, the number of connections between the LC-filter chip and the detector chip is of the order of the number of pixels (3⋅103 for the short wavelength array). Wire bonding is the standard and space qualified technique, but can only be reworked 3 times on a detector or LC-filter chip. Although it is feasible to build the instrument in this way, it strongly limits the flexibility and yield of the assembly process.
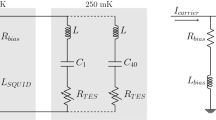
As all the signals are AC coupled, no DC connections between the detector chip and the LC filter chip are required. Instead, transformer coupling is sufficient, which has distinct advantages for the instrument assembly phase. Transformer coupling can be implemented by means of a planar primary coil on the LC filter chip side, and a planar secondary coil on the detector chip. By stacking the chips, well aligned, a transformer with a moderate coupling factor of k≈0.7 can be created. This coupling factor is sufficient to ensure the pixel readout without signal-to-noise degradation. Note that this assembly makes it possible to test and qualify both LC filter and detector chips, as they are closed electrical circuits owing to the transformer coils. The schematic diagram of the resulting bias circuit is shown in Fig. 2.

(Color online) Schematic picture of the bolometer arrays and their FDM readout circuit for two pixels. The different boxes represent the different chips. The interconnection between the LC filter chip and the TES chip is magnetic and therefore reworkable
The relative low resistance of the TESes (<100 mΩ) keeps the sizes of the primary and secondary coil small. We estimate that for an available area of 1 mm2 per pixel, a cross talk level of <10−3 can be obtained.
The turns ratio of the transformer is driven by matching the TES resistance to the most compact LC-filter design. For the current dimensions, moderate transformation ratios of the order of 2 are sufficient to make the match. Note that this approach makes it also possible to independently optimize the LC-filter chip for size, and the detector/TES square resistance for performance, as the matching can be tuned using the turns ratio.
3.2 Signal Summing Point
The bias circuits of all pixels have one branch (or signal current summing point) in common where all the signals are added, and which consists of the first stage SQUID input coil. Beside the current summing point, there is a second common branch, in which the common voltage source is located, as was illustrated in Fig. 2.
As the common element forms a pathway for cross talk [4], their impedances should be minimized to limit the cross talk. For SAFARI case, the combination of the channel packing density, bolometer bandwidth, bolometer resistance, and cross talk requirements (L c /L<6⋅10−4) leads to a challenging coupled energy resolution requirement for the SQUID of \(\varepsilon_{c}=0.5 \L_{c} i_{n}^{2} =60\ \mathrm{h}\) when L c =L input,squid, i.e. excluding the effect of parasitic inductances. Note that this requirement fundamentally scales with the packing density of the pixels in frequency space through the cross talk requirements, but is independent of the absolute values of the inductances.
However, assuming L c =L input,squid is not realistic in the most compact design, as L c =1.2 nH for the preferred most compact LC filter design, while for a direct coupled wire bonded SQUID, the stray inductances of the bonding wires are already of the order of L s ≈1 nH, and have therefore a big effect on the required SQUID coupled energy resolution, i.e. ε c ≈60 h⋅(L c −L s )/L c =10 h.
In order to reduce the influence of the relatively large parasitic inductance of the bonding wires to the SQUID, we are considering to use a step-up transformer at the LC-filter chip to increase the impedance level of the summing point. We have shown that producing a 1:8 step-up transformers with the right impedance levels and a coupling factor of 0.98 is feasible, which leads to an acceptable stray inductance of <20%.
Further integration and optimization can be obtained when both the voltage source summing point and the signal current summing point are combined in a single summing point. The resulting circuit is shown in Fig. 3. In this circuit the capacitive voltage divider C n /C cn together with the LC filter is used as a resonant step-up transformer to step up the impedance levels of the bolometers by a factor of (C n /C cn )2, and therefore also the allowable inductance in the summing point. Note that an impedance transformation only changes the impedance levels, but the energy resolution requirement remains unchanged.

Bias circuit for two transformer coupled TESs, with an integrated voltage and current summing point. The SQUID is placed in series with the voltage source
4 Conclusion
The design of the SAFARI instrument involves making careful and well-balanced decisions on many different aspects. The available bandwidth for frequency domain multiplexing is limited on the lower side by component sizes, and on the upper side by power consumption in the data processing electronics at room temperature. This has led to a choice for operating frequencies between 1 and 3 MHz, with a multiplexing factor of 160, limited by cross talk requirements.
The SQUID chain consist of 2 SQUID stages at base temperature and 1.7 K, respectively, where the first stage is power limited, and the second stage a differential cable driving SQUID. A cryogenic low noise amplifier at 135 K will help further to increase the signal level above the expected environmental electromagnetic interference levels.
The focal plane assemblies will house the bolometer arrays, their shielding, and the bandpass filters and SQUID amplifiers. The AC coupled nature of the signals makes it possible to use transformer couplings between the stages, thereby avoiding the need of many wire bonds, and increasing the testability and separate space qualification of the various components.
References
B. Jackson et al., The SPICA-SAFARI detector system: TES detector arrays with FDM SQUID readout. IEEE Trans. THz Sci. Technol. (2011, accepted)
M.P. Bruijn et al., High-Q LC filters for FDM read out of cryogenic sensor arrays. J. Low Temp. Phys. (2012). doi:10.1007/s10909-011-0422-5
R. den Hartog et al., Low-noise readout of TES detectors with baseband feedback frequency domain multiplexing. J. Low Temp. Phys. (2012)
J. van der Kuur et al., Implementation of FDM in imaging arrays of microcalorimeters. Nucl. Instrum. Methods A 520, 551–554 (2004)
B. Swinyard, T. Nakagawa, The space infrared telescope for cosmology and astrophics: Spica a joint mission between jaxa and esa. Exp. Astron. 23(1), 193–219 (2009)
Open Access
This article is distributed under the terms of the Creative Commons Attribution Noncommercial License which permits any noncommercial use, distribution, and reproduction in any medium, provided the original author(s) and source are credited.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
Open Access This is an open access article distributed under the terms of the Creative Commons Attribution Noncommercial License (https://creativecommons.org/licenses/by-nc/2.0), which permits any noncommercial use, distribution, and reproduction in any medium, provided the original author(s) and source are credited.
About this article
Cite this article
van der Kuur, J., Beyer, J., Bruijn, M. et al. The SPICA-SAFARI TES Bolometer Readout: Developments Towards a Flight System. J Low Temp Phys 167, 561–567 (2012). https://doi.org/10.1007/s10909-012-0521-y
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10909-012-0521-y