
Abstract
In this paper, delay-dependent robust stabilization and H∞ control for uncertain stochastic Takagi-Sugeno (T-S) fuzzy systems with discrete interval and distributed time-varying delays are discussed. The purpose of the robust stochastic stabilization problem is to design a memoryless state feedback controller such that the closed-loop system is mean-square asymptotically stable for all admissible uncertainties. In the robust H∞ control problem, in addition to the mean-square asymptotic stability requirement, a prescribed H∞ performance is required to be achieved. Sufficient conditions for the solvability of these problems are proposed in terms of a set of linear matrix inequalities (LMIs) and solving these LMIs, a desired controller can be obtained. Finally, two numerical examples are given to illustrate the effectiveness and less conservativeness of our results over the existing ones.
Similar content being viewed by others

1 Introduction
In modeling of dynamical systems, Takagi-Sugeno (T-S) fuzzy systems[1] provide an alternative approach to the control of plants that are complex, uncertain, and ill-defined. In the last two decades, with wide applications from consumer products to industrial processes, T-S fuzzy model[1–5] is proven to be effective universal approximations over differential geometric and differentiable algebraic methods. By making use of simple fuzzy reasoning rules and fuzzy inference methods, it provides a basis for development of systematic approaches to stability, stabilization, H ∞ control and filtering problems[6–13].
Time delays are often encountered in many industrial and engineering systems such as chemical processes, rolling mill systems, networked control systems, etc. It is well known that time delays can cause poor performance or instability. Therefore, the problem of delay-dependent stability analysis and controller synthesis for T-S fuzzy systems with time delays have received great efforts by many researchers in recent years. Moreover, delay-dependent approaches[6,9,14] are generally less conservative than delay-independent[2] ones when the sizes of time delays are small. Recently, the delay-dependent stabilization and H ∞ control of T-S fuzzy systems with interval time-varying delay are discussed[15,16]. Robust stability, stabilization and H ∞ controller design of discrete and distributed time delays with or without fuzzy systems are considered[17–19].
In the past few years, stochastic nonlinear systems have received much attention since stochastic modeling has come to play an important role in many branches of science and engineering applications. For instance, stabilization, H ∞ control, and H ∞ filtering problems for linear and nonlinear stochastic systems have been considered[20–26]. The control technique based on the so-called T-S fuzzy model has attracted lots of attention. Recently, some attempts have been made to use T-S fuzzy model based control technique for stochastic nonlinear systems[27–30]. Very recently, the delay-dependent robust H ∞ control for uncertain stochastic T-S fuzzy systems with time delays have been discussed in [31,32]. However, to the best of our knowledge, the delay-dependent robust stabilization and H ∞ control for uncertain stochastic T-S fuzzy systems with discrete interval and distributed time-varying delays have not yet been fully investigated and this will be the goal of this paper.
In this paper, we investigate the problem of the delay-dependent robust stabilization and H ∞ control for uncertain stochastic T-S fuzzy systems with discrete interval and distributed time-varying delays. The uncertainties are assumed to be norm bounded and time-varying. For the robust stabilization problem, a state feedback fuzzy controller is designed such that the closed-loop system is mean-square asymptotically stable for all admissible uncertainties, while for the robust H∞ control problem, a state feedback fuzzy controller is designed such that the closed-loop system is not only mean-square asymptotically stable but also guarantees a prescribed H∞ performance level. Sufficient conditions for the solvability of these problems are obtained, and desired state feedback controllers can be constructed by solving certain LMIs. Further, two numerical examples are given to illustrate the effectiveness of the proposed approach.
Throughout this paper, notation X ⩾ Y X > Y) where X and Y are symmetric matrices, means that X − Y is positive semidefinite (respectively, positive definite). I denotes the identity matrix of appropriate dimension. L 2[0, ∞) is the space of square integrable vector. Moreover, let (\(\Omega ,\mathcal{F},{\left\{ {{\mathcal{F}_t}} \right\}_{t0,}}\mathcal{P}\)) be a complete probability space with a filtration \({\left\{ {{\mathcal{F}_t}} \right\}_{t \geqslant 0}}\) satisfying the usual conditions (i.e., the filtration contains all \(\mathcal{P}\)-null sets and is right continuous). The symmetric elements of the symmetric matrix will be denoted by ✽. Matrices, if their dimensions are not explicitly stated, are assumed to have compatible dimensions for algebraic operations.
2 Problem formulation
Consider the following uncertain stochastic T-S fuzzy model with discrete and distributed time-varying delays described by
Plant rule i: If θ 1(t) is η i 1 and θ 2(t) is η i 2 and ⋯ and θp(t) is ηip, then
where η ij is the fuzzy set, θ 1 (t), θ 2 (t), ⋯ ,θ p(t) are the premise variables, r is the number of IF-THEN rules of T-S fuzzy model, x(t) ∈ Rn is the state, u(t) ∈ Rm is control input, v(t) ∈ Rp is a disturbance input which belongs to L 2[0, ∞), z(t) ∈ Rq is controlled output vector, and ω(t) ∈ Rn is a one-dimensional Brownian motion defined on the probability space (\(\Omega ,\mathcal{F},{\left\{ {{\mathcal{F}_t}} \right\}_{t0,}}\mathcal{P}\)) satisfying \(\varepsilon \left\{ {{\text{d}}w\left( t \right)} \right\} = 0,{\text{ }}\varepsilon \left\{ {{\text{d}}w{{\left( t \right)}^2}} \right\} = dt\). In the above system (Σ), Ai, A di , B 1 i , B vii , B dli , C i , C di , B 2i , B v2i , B d2i , Di, D di and B 3i are known real constant matrices with appropriate dimensions. ∆ A i(t), ∆A di(t), ∆B 1 i (t), ∆C i(t), ∆Cdi(t) and ∆B 2i(t) are unknown matrices representing time-varying parameter uncertainties, τ(t) and d(t) are bounded continuous time-varying delays satisfying
where τ m , τ M , μ and d M are real constant scalars. Let τ = max{τ M, d M}. φ(t) is real valued continuous initial function on [−τ,0]. In this paper, the parameter uncertainties are assumed to be of the form
where E i , H 1i , H 2i , H 3i , H 4i , H 5i and H 6i are known real constant matrices with appropriate dimensions, and F i(t) is an unknown real time-varying matrix function satisfying
It is assumed that all elements of F i(t) are Lebesgue measurable. ∆Ai(t), ∆Adi(t), ∆B 1 i (t), ∆C i(t), ∆C di(t) and ∆B 2i(t) are said to be admissible if both (5) and (6) hold.
By using center average defuzzifier, product inference and singleton fuzzifier, the global dynamics of the T-S fuzzy system (Σ) can be inferred as
where \({h_i}\left( {\theta \left( t \right)} \right) = \frac{{{v_i}\left( {\theta \left( t \right)} \right)}}{{\mathop {\lim }\limits_{x \to \infty } \sum\nolimits_{i = 1}^r {{v_i}\left( {\theta \left( t \right)} \right)} }},{v_i}\left( {\theta \left( t \right)} \right) = {\prod\nolimits_{j = 1}^p \eta _{ij}}\left( {\theta \left( t \right)} \right)\), and η ij(θ j(t)) is the i grade of membership value of θ j(t) in η ij. In this paper, we assume that ν i( θ (t)) ⩾ 0 for i = 1,2, ⋯ ,r and \(\sum\nolimits_{i = 1}^r {{v_i}} \left( {\theta \left( t \right)} \right) > 0\) for all t . Therefore, hi( θ (t)) ⩾ 0 (for i = 1'2,••• ,r), and \(\sum\nolimits_{i = 1}^r {{h_i}} \left( {\theta \left( t \right)} \right) > 0\) for all t. In the sequel, for simplicity, we use h i to represent h i(θ (t)).
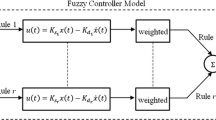
Based on the parallel distributed compensation schemes, a fuzzy model of a state feedback controller for the system (Σ1) is formulated as follows:
Control rule i: If θ 1(t) is η i 1 and θ 2(t) is η i 2 and ⋯ and θ p ( t) is η i p, then
The overall state feedback fuzzy control law is represented by
where Ki (i = 1, 2, ⋯ , r) are the local control gains. Under control law (11), the overall closed-loop system is obtained as
where
Let us introduce the following definition and lemmas that are useful for the development of our results.
Definition 1[25]. The nominal system (7) and (9) with u(t) = 0 and v(t) = 0 is said to be mean-square stable if for any ε > 0, there exists δ(ε) > 0 such that \(\varepsilon \left\{ {|x\left( t \right){|^2}} \right\} < \varepsilon \) when
In addition,
for any initial conditions, then the nominal system (7) and (9) with u(t) = 0 and v(t) = 0 is said to be mean-square asymptotically stable. The uncertain stochastic system (7) and (9) is said to be robustly stochastically stable if the system associated to (7) and (9) with u(t) = 0 and v(t) = 0 is mean-square asymptotically stable for all admissible uncertainties ∆A i(t), ∆A di(t), ∆B 1i (t), ∆C i(t), ∆C di(t) and ∆B 2i (t).
In this paper, our aim is to develop techniques of robust stochastic stabilization and robust H ∞ control for the stochastic fuzzy system (Σ2). More specifically, we are concerned with the following two problems:
-
1)
Robust stabilization problem: Design a state feedback controller (11) for the system (7) and (9) with v(t) = 0 such that the resulting closed-loop system (12) and (14) with v(t) = 0 is mean-square asymptotically stable for all admissible uncertainties. In this case, the system (12) and (14) with v(t) = 0 is robustly stochastically stablilizable.
-
2)
Robust H ∞ control problem: Given a scalar γ > 0, design a state feedback controller in the form of (11) for system (Σ1) such that, for all admissible uncertainties, the resulting closed-loop system (Σ2) is mean-square asymptotically stable, and for any non-zero v(t) ∈ L 2[0, ∞), \(||z\left( t \right)||{\varepsilon _2} < \gamma ||v\left( t \right)|{|_2}\) is satisfied under zero initial condition. In this case, the system (Σ2) is robustly stochastically stabilizable with disturbance attenuation level γ.
Lemma 1[33]. For any vectors x, y ∈ Rn, matrices \(P \in {{\text{R}}^{n \times n}},D \in {{\text{R}}^{n \times {n_f}}},E \in {{\text{R}}^{{n_f} \times n}}\) and \(F \in {{\text{R}}^{{n_f} \times {n_f}}}\) with \(P > 0,||F|| \leqslant 1\), and scalar ε > 0, we have
-
1)
2x T y ⩾ x T P-1 x + y T Py,
-
2)
DFE + E T F T D T⩾ ε-1 DD T + εE T E.
Lemma 2[21]. For any constant matrix M > 0, any scalars a and b with a < b, and a vector function x(t) : [a, b] → Rn such that the integrals concerned are well defined, the following holds:
Lemma 3[27]. For any real matrices X ij for i,j = 1, 2, ⋯ , r and Λ > 0 with appropriate dimensions, we have
where hi (1 ⩽ i ⩽ r) are defined as h i ( θ(t)) ⩾ 0, \(\sum\nolimits_{i = 1}^r {{h_i}} \left( {\theta \left( t \right)} \right) = 1\).
3 Robust stochastic stabilization
In this section, we shall present a sufficient condition for the uncertain stochastic fuzzy system (12) and (14) with v(t) = 0 to be robustly stochastically stabilizable in terms of LMIs. The design of the fuzzy controller is to determine the local feedback gains Ki(i = 1, 2, • • • ,r) such that the system (12) and (14) with v(t) = 0 is robustly stochastically stabilizable. When there are no parameter uncertainties in the system (12) and (14) with v(t) = 0, Theorem 1 is specialized as follows.
Theorem 1. For given scalars τ m , τ M , d M and μ, the time-varying delays satisfying (4), the closed-loop stochastic fuzzy system (12) and (14) with v(t) = 0 and ∆ A i(t) = ∆A di(t) = ∆B 1i (t) = ∆C i(t) = ∆Cdi(t) = ∆B 2i(t) = 0 is stochastically stabilizable if there exist matrices X > 0, \({\bar Q_s} > 0\) (s = 1,2,3), \({\tilde R_l} > 0\) (l = 1,2,3,4), \(\bar Z > 0\) and real matrices \({\bar N_{lij}},{\bar M_{lij}},{\bar S_{lij}},{Y_j}\)(l = 1, 2, 1 ⩽ i ⩽ j ⩽ r) of appropriate dimensions such that the following LMIs hold:

where
with
Moreover, the state feedback gain can be constructed as K j = Y j X −1 (j = 1, 2,••• , r).
Proof. Let
then the closed-loop nominal system (12) with v(t) = 0 can be represented as
where
Choose a Lyapunov-Krasovskii functional candidate as
where
where P, Q s (s = 1,2,3), R l (l = 1,2,3,4) and Z are symmetric positive definite matrices with appropriate dimensions.
By using Itô′s formula[34], we have
where
It is easy to know
From the Newton-Leibnitz formula, the following equalities are true for matrices N lij , M lij , S lij (l = 1,2) with appropriate dimensions:
By Lemma 1 1), for matrices Rt ⩾ 0 (l=1,2,3,4), the following inequalities hold:
where

Using Lemma 3, one can derive that
where
Similarly
where

Then, it follows from Lemma 2, that
Combining (20) to (32), we get
where
with
It can be known that
and
Taking the mathematical expectation on both sides of (33) and using (34)−(36), we get
If Ξii < 0 for 1 ⩽ i ⩽ r and Ξij + Ξji < 0 for any 1 ⩽ i < j ⩽ r, it yields \(\varepsilon \left\{ {LV({x_t},t} \right\} < 0\). Employing the Schur complement, Ξii < 0 and Ξ ij + Ξ ji < 0 are equivalent to
for any 1 ⩽ i ⩽ j ⩽ r, where
with
and \(\Psi _{11}^{ij}\) is defined previously.
Pre- and post-multiply (38) by diag{X,X, X, X, X, X, I,I,I,I,X,X,X,X,X,X} and its transpose, respectively, and applying the change of variables such that \(P = {X^{ - 1}},Z{Q_s}X = {\bar Q_s}(s = 1,2,3),XYZ = \bar Z,X{N_{lij}}X = {\bar N_{lij}},X{M_{lij}}X = {\bar M_{lij}},X{S_{lij}} = {\bar S_{lij}}(l = 1,2)\), then it gives
for 1 ⩽ i ⩽ j ⩽ r, where

and \(\Xi _{11}^{ij},\Xi _{12}^{ij},\Xi _{13}^{ij}\) are defined in statement of Theorem 1. It follows from inequalities
that
Let us assume that \(R_l^{ - 1} = \tilde Rl(l = = 1,2,3,4)\). Then, LMI (39) is equivalent to the LMIs defined in (15) and (16). Therefore, by Definition 1 and [35], the closed-loop nominal stochastic fuzzy system (12) and (14) is stochastically stable with v(t) =0.
In the following part, using Lemma 1 2), we extend the above result to the uncertain stochastic fuzzy system (12) and (14) with v(t) = 0 to obtain a delay-dependent criterion as stated in the following theorem by means of the feasibility of LMIs.
Theorem 2. For given scalars τ m , τ M , d M and μ, the time-varying delays satisfying (4), and the closed-loop uncertain stochastic fuzzy system (12) and (14) with v(t) = 0 is robustly stochastically stabilizable, if there exist matrices \(X > 0,{\bar Q_s} > 0(s = 1,2,3),{\tilde R_l} > 0(l = 1,2,3,4),\tilde Z > 0,\), and real matrices \({\bar N_{lij}},{\bar M_{lij}}{\bar S_{lij}}{Y_j}(l = 1,2)\) of appropriate dimensions and scalars ε 1 ij > 0, ε 2ij > 0 (1 ⩽ i ⩽ j ⩽ r) such that the following LMIs hold:
where
\(\Xi _{11}^{ij},\Xi _{12}^{ij},\Xi _{13}^{ij},{\Xi _{22}}\,and\,{\Xi _{33}}\) are defined in Theorem 1. Moreover, the state feedback gain can be constructed as K j = Y j X −1 (j = 1, 2, ⋯,r).
Proof. For the sake of presentation and simplicity, denote
Replacing Ai, A di , B 1 i , Ci, C di , and B 2i in Theorem 1 with Ai + ∆Ai(t), A di + ∆A di(t), B 1 i + ∆B1i (t), C i + ∆C i(t), C di + ∆Cdi( t), and B 2i + ∆B2i(t) respectively, we obtain the following corresponding uncertain stochastic fuzzy system (12) and (14) with v(t) = 0
By Lemma 1 2), we have
By Schur complement, we obtain (40) and (41). Then, by Theorem 1, the closed-loop uncertain stochastic fuzzy system (12) and (14) is robustly stochastically stable with v(t) =0.
In the case of u(t) = 0, v(t) = 0, B d 1z = B d2z = 0, ∆C i(t) = 0 and ∆C di(t) = 0, the system (7) is reduced to the following model
where the time-varying delay τ(t) satisfies
with τ M and μ are real constant scalars. In the system (44), the parameter uncertainties are assumed to be of the form
where E 1i , E 2i , H 1i and H 2i are known real constant matrices with appropriate dimensions, F 1i (t) and F 2i (t) are unknown real time-varying matrix function satisfying
When there are no parameter uncertainties in the system (44), the following corollary can be obtained by using Theorem 1.
Corollary 1. For given scalars τ M and μ, the time-varying delays satisfying (46), the nominal stochastic fuzzy system (44) is asymptotically stable in the mean square sense if there exist matrices P > 0, Q1 > 0, Q 3 > 0, R1 > 0, R 3 > 0, and real matrices N li and S li (l = 1, 2) of appropriate dimensions such that the following LMI holds:
where
with
Remark 1. Choose the following Lyapunov-Krasovskii functional candidate as in (18) with Q 2 = 0, R 2 = 0, R 4 = 0, Z = 0, replacing N lij and S lij (l = 1,2) with N li and S li (l = 1,2) in (21) and (23) respectively, and taking M lij as zero in (22), the proof of Corollary 1 is easily obtained from Theorem 1.
For the system (44), the robust stability conditions can be obtained as stated in the following Corollary 2 by extending the proof of Corollary 1.
Corollary 2. For given scalars τ M and μ, the time-varying delays satisfying (46), the uncertain stochastic fuzzy system (44) is robustly asymptotically stable in the mean square if there exist matrices P > 0, Q1 > 0, Q 3 > 0, R1 > 0, R 3 > 0, real matrices N li and S li (l = 1, 2) of appropriate dimensions, and scalars ε 1 i > 0 and ε 2i > 0 such that the following LMI holds:
where
with
Further, \(\phi _{12}^i,\phi _{13}^i\), Φ 22, Φ33 and \(\phi _{12}^i\) are defined in Corollary 1.
4 Robust stochastic H ∞ control
In this section, a delay-dependent sufficient condition for the solvability of robust H ∞ control problem is proposed, and an LMI approach for designing a desired state feedback fuzzy controller is developed. The second main result is stated as follows.
Theorem 3. For a prescribed γ > 0, given scalars τ m , τ M , d M and μ, the time-varying delays satisfying (4), there exists a fuzzy control law (11) such that the closed-loop uncertain stochastic fuzzy system (Σ2) is robustly stochastically stabilizable with attenuation γ if there exist matrices X > 0, \({\bar Q_s} > 0\) (s = 1,2, 3), \({\tilde R_l} > 0\) (l = 1,2,3,4), \(\bar Z > 0\), real matrices \({\bar N_{lij}},\;{\bar M_{lij}},{\bar S_{lij}}\), Yj (l = 1,2) of appropriate dimensions, and scalars ε 1 ij > 0, ε 2ij > 0 (1 ⩽ i ⩽ j ⩽ r) such that the following LMIs hold:
where

with

Further, \(\Xi _{14}^{ij}\), Ξ22, \(\Xi _{24}^{ij}\), Ξ33, \(\Xi _{44}^{ij},\;\phi _{11}^{ij},\;\phi _{12}^{ij},\;\phi _{22}^{ij}\) and \(\bar \tau \) are defined as in Theorem 2. Moreover, the state feedback gain can be constructed as K j = Y j X −1 (j = 1, 2, ⋯,r).
Proof. For convenience, we set
By (51) and (52), it is easy to see that the LMIs in (40) and (41) hold. Therefore, it follows from Theorem 2 that the closed-loop system (Σ2) is robustly stochastically stable. Now, we show that under the zero initial condition, system (Σ2) satisfies \(||z(t)||{\varepsilon _2} < \gamma ||v(t)|{|_2}\) for all non-zero v(t) ∈ L 2[0,oo). Choose a Lyapunov-Krasovskii functional candidate as defined in (18) and utilizing Itˆô′s formula, we have
where

with


It can be known that
where
Now, we set
where t > 0. Because V(φ(t),0) = 0 under the zero initial condition, i.e., φ(t) = 0 for t e [−τ, 0], then by Itˆo’s formula, it follows that
where
Then, considering LMIs (51) and (52), following similar line as in the proof of Theorem 2, we have \({\tilde \Upsilon ^{ii}} < 0\) and \({\tilde \Upsilon ^{ij}} + {\tilde \Upsilon ^{ji}} < 0\), which imply that J(t) < 0 for t > 0. Therefore, we have \(||z(t)||{\varepsilon _2} < \gamma ||v(t)|{|_2}\).
Remark 2. We mention that Theorem 3 provides a delay-dependent H ∞ control problem for a class of uncertain stochastic fuzzy systems with discrete interval and distributed time-varying delays. Note that, by Theorem 3, the problems of finding the maximum allowable upper bound of the delays are τ M , d M , for given γ, μ and τ m or the smallest γ for given τ m , τ M , μ and d M can be easily solved. For instance, the smallest γ for given τ m , τ M , μ and d M obtainable from Theorem 3 can be determined by solving the following convex optimization problem:
Remark 3. By setting \({B_{{d_1}}} = 0,\;\;{B_{{d_2}}} = 0\) in Theorems 2 and 3, the delay-dependent robust stabilization and H ∞, control for uncertain stochastic fuzzy system with interval time-varying delay criteria can be obtained, corresponding proof is similar to Theorems 2 and 3 and hence omitted.
In the case when there is no parameter uncertainties in the system (Σ2), Theorem 3 is specialized as follows.
Corollary 3. For a prescribed γ > 0, given scalars τ m , τ M , d M and μ, the time-varying delays satisfying (4), there exists a fuzzy control law (11) such that the closed-loop stochastic fuzzy system (Σ2) with ∆A i (t) = ∆A di(t) = ∆B 1 i (t) = ∆Ci(t) = ∆C di(t) = ∆B 2i(t) = 0 is stochastically stabilizable with a disturbance attenuation γ, if there exist matrices \(X > 0,{\bar Q_s} > 0(s = 1,2,3),{\tilde R_l} > 0(l = 1,2,3,4),\tilde Z > 0,\) and real matrices \({\bar N_{lij}},{\bar M_{lij}},{\bar S_{lij}},{Y_j}(l = 1,2)\) of appropriate dimensions such that the following LMIs hold:

where \(\Upsilon _{11}^{ij},\Upsilon _{12}^{ij},\Upsilon _{13}^{ij}\) Υ22 and Υ33 are defined in Theorem 3. Moreover, the state feedback gain can be constructed as K j = Y jX- 1 (j = 1, 2, • • • ,r).
5 Numerical examples
In this section, we provide illustrative examples to demonstrate the effectiveness of the method proposed in the previous section.
Example 1. Consider the uncertain stochastic T-S fuzzy system (44) with parameters as follows
For this example, according to Corollary 2, system (44) is robustly asymptotically stable in the mean square. The maximal allowable upper bound of the time delay τ M for various μ are shown in Table 1. Obviously, our result is less conservative than the method in [27]. Assuming τM = 0.1328 and μ = 0.3, solving LMI (50) in Corollary 2 by the Matlab LMI toolbox, we have the following feasible solutions:
The time varying delay is assumed as τ(t) = 0.13 + 0.0028 sin(t). For a membership function \({h_1}({x_1}(t)) = \frac{1}{{1 + {e^{({x_1}(t) + 0.5)}}}},{h_2}({x_1}(t)) = 1 - {h_1}({x_1}(t))\), and an initial function φ(t) = [−3, 3]T, the simulation results of the state response of the system are plotted in Fig. 1.

State response of the system
Example 2. Consider the uncertain stochastic T-S fuzzy system (Σ2) with parameters as
In this example, our aim is to design a state feedback fuzzy controller such that, for all admissible uncertainties, the closed-loop system is robustly stochastically stable with disturbance attenuation γ = 0.2. The maximum allowable upper bounds of the time delay τ (for τ M = d M) are obtained for different τ m and various μ from Theorem 3 which are shown in the Table 2. For τ m = 0.1, μ = 0.2, the time delay τ M = 0.3432, and d M = 0.3432, solving the LMIs (51) and (52) through Matlab LMI control toolbox, the feasible solutions are given by:
By Theorem 3, we can obtain the desired state-feedback fuzzy controller as
Define the membership functions as \({h_1}({x_1}(t)) = \frac{{1 - \sin ({x_1}(t))}}{2}\,and\,{h_2}({x_1}(t)) = \frac{{1 + \sin ({x_1}(t))}}{2}\). The time-varying delays are assumed as τ(t) = 0.34 + 0.0032 sin(t) and d(t) = 0.34 + 0.0032sin(t), with an initial condition φ(t) = [−3, 2.5]T. The disturbance input is assumed to be \({v_1}(t) = \frac{1}{{0.2 + {t^2}}}\) and \({v_2}(t) = \frac{1}{{1 + {t^2}}}\). Fig. 2 shows the state response of the closed-loop system. Figs. 3 and 4 show the graphical representation of the control input and controlled output respectively. From the above, it can be seen that the designed H ∞ controller satisfies the specified requirements.

State response of the closed-loop system

Control input

Controlled output
6 Conclusions
In this paper, some sufficient conditions have been derived for the solvability of problems of delay-dependent robust stabilization and H ∞ controller design for uncertain stochastic T-S fuzzy systems with discrete interval and distributed time-varying delays. These conditions are expressed in terms of LMIs, which can be easily tested by using Matlab control toolbox. It has been shown that a desired state feedback controller can be constructed when the LMIs are feasible. Finally, two numerical examples have been given to illustrate the effectiveness of the developed techniques.
References
T. Takagi, M. Sugeno. Fuzzy identification of systems and its applications to modeling and control. IEEE Transactions on Systems, Man, and Cybernetics, vol. 15, no. 1, pp. 116–132, 1985.
Y. Y. Cao, P. M. Frank. Analysis and synthesis of nonlinear time-delay systems via fuzzy control approach. IEEE Transactions on Fuzzy Systems, vol. 8, no. 2, pp. 200–211, 2000.
K. Tanaka, T. Ikeda, H. O. Wang. Robust stabilization of a class of uncertain nonlinear systems via fuzzy control: Quadratic stabilizability, H∞ control theory, and linear matrix inequalities. IEEE Transactions on Fuzzy Systems, vol. 4, no. 1, pp. 1–13, 1996.
K. Tanaka, M. Sugeno. Stability analysis and design of fuzzy control systems. Fuzzy Sets and Systems, vol. 45, no. 2, pp. 135–156, 1992.
H. O. Wang, K. Tanaka, M. F. Griffin. An approach to fuzzy control of nonlinear systems: Stability and design issues. IEEE Transactions on Fuzzy Systems, vol. 4, no. 1, pp. 14–23, 1996.
B. Chen, X. Liu. Delay-dependent robust H∞ control for T-S fuzzy systems with time delay. IEEE Transactions on Fuzzy Systems, vol. 13, no. 4, pp. 544–556, 2005.
H. J. Gao, X. M. Liu, J. Lam. Stability analysis and stabilization for discrete-time fuzzy systems with time-varying delay. IEEE Transactions on Systems, Man, and Cybernetics, Part B: Cybernetics, vol. 39, no. 2, pp. 306–317, 2009.
X. Li, X. P. Zhao, J. Chen. Controller design for electric power steering system using T-S fuzzy model approach. International Journal of Automation and Computing, vol. 6, no. 2, pp. 198–203, 2009.
C. Lin, Q. G. Wang, T. H. Lee. Improvement on observer-based H∞ control for T-S fuzzy systems. Automatica, vol. 41, no. 9, pp. 1651–1656, 2005.
S. K. Nguang, P. Shi. H∞ fuzzy output feedback control design for nonlinear systems: An LMI approach. IEEE Transactions on Fuzzy Systems, vol. 11, no. 3, pp. 331–340, 2003.
Z. L. Xia, J. M. Li, J. R. Li. Delay-dependent non-fragile H∞ filtering for uncertain fuzzy systems based on switching fuzzy model and piecewise Lyapunov function. International Journal of Automation and Computing, vol. 7, no. 4, pp. 428–437, 2010.
X. D. Zhao, Q. S. Zeng. H∞ output feedback control for stochastic systems with mode-dependent time-varying delays and Markovian jump parameters. International Journal of Automation and Computing, vol. 7, no. 4, pp. 447–454, 2010.
S. S. Zhou, G. Feng, J. Lam, S. Y. Xu. Robust H∞ control for discrete-time fuzzy systems via basis-dependent Lyapunov functions. Information Sciences, vol. 174, no. 3-4, pp. 197–217, 2005.
J. M. Jiao. Robust stability and stabilization of discrete singular systems with interval time-varying delay and linear fractional uncertainty. International Journal of Automation and Computing, vol. 9, no. 1, pp. 8–15, 2012.
X. F. Jiang, Q. L. Han. Robust H∞ control for uncertain Takagi-Sugeno fuzzy systems with interval time-varying delay. IEEE Transactions on Fuzzy Systems, vol. 15, no. 2, pp. 321–331, 2007.
E. G. Tian, D. Yue, Y. J. Zhang. Delay-dependent robust H∞ control for T-S fuzzy system with interval time-varying delay. Fuzzy Sets and Systems, vol. 160, no. 12, pp. 1708–1719, 2009.
Y. M. Li, S. Y. Xu, B. Y. Zhang, Y. M. Chu. Robust stabilization and H∞ control for uncertain fuzzy neutral systems with mixed time delays. Fuzzy Sets and Systems, vol. 159, no. 20, pp. 2730–2748, 2008.
J. Yoneyama. Robust stability and stabilizing controller design of fuzzy systems with discrete and distributed delays. Information Sciences, vol. 178, no.8, pp. 1935–1947, 2008.
H. R. Karimi. Adaptive H∞ synchronization of master-slave systems with mixed time-varying delays and nonlinear perturbations: An LMI approach. International Journal of Automation and Computing, vol. 8, no. 4, pp. 381–390, 2011.
H. J. Gao, J. Lam, C. H. Wang. Robust energy-to-peak filter design for stochastic time-delay systems. Systems and Control Letters, vol. 55, no. 2, pp. 101–111, 2006.
H. Y. Li, B. Chen, Q. Zhou, C. Lin. A Delay-dependent approach to robust H∞ control for uncertain stochastic systems with state and input delays. Circuits, Systems, and Signal Processing, vol. 28, no. 1, pp. 169–183, 2009.
Y. R. Liu, Z. D. Wang, X. H. Liu. Robust H∞ control for a class of nonlinear stochastic systems with mixed time delay. International Journal of Robust and Nonlinear Control, vol. 17, no. 16, pp. 1525–1551, 2007.
L. Ma, F. P. Da, L. Y. Wu. Delayed-state-feedback exponential stabilization of stochastic Markovian jump systems with mode-dependent time-varying state delays. Acta Automatica Sinica, vol. 36, no. 11, pp. 1601–1610, 2010.
J. Q. Qiu, H. K. He, P. Shi. Robust stochastic stabilization and H∞ control for neutral stochastic systems with distributed delays. Circuits, Systems, and Signal Processing, vol. 30, no. 2, pp. 287–301, 2011.
S. Y. Xu, T. W. Chen. Robust H∞ control for uncertain stochastic systems with state delay. IEEE Transactions on Automatic Control, vol. 47, no. 12, pp. 2089–2094, 2002.
S. Y. Xu, J. Lam, H. J. Gao, Y. Zou. Robust H∞ filtering for uncertain discrete stochastic systems with time delays. Circuits, Systems, and Signal Processing, vol. 24, no. 6, pp. 753–770, 2005.
H. Huang, D. W. C. Ho. Delay-dependent robust control of uncertain stochastic fuzzy systems with time-varying delay. IET Control Theory and Applications, vol. 1, no. 4, pp. 1075–1085, 2007.
J. L. Liang, Z. D. Wang, X. H. Liu. Robust passivity and passification of stochastic fuzzy time-delay systems. Information Sciences, vol. 180, no. 9, pp. 1725–1737, 2010.
Z. Wang, D. W. C. Ho, X. Liu. A note on the robust stability of uncertain stochastic fuzzy systems with time-delays. IEEE Transactions on Systems, Man, and Cybernetics, Part A: Systems and Humans, vol. 34, no. 4, pp. 570–576, 2004.
B. Y. Zhang, S. Y. Xu, G. D. Zong, Y. Zou. Delay-dependent stabilization for stochastic fuzzy systems with time delays. Fuzzy Sets and Systems, vol. 158, no. 20, pp. 2238–2250, 2007.
T. Senthilkumar, P. Balasubramaniam. Delay-dependent robust H∞ control for uncertain stochastic T-S fuzzy systems with time-varying state and input delays. International Journal of Systems Science, vol. 42, no. 5, pp. 877–887, 2011.
T. Senthilkumar, P. Balasubramaniam. Robust H∞ control for nonlinear uncertain stochastic T-S fuzzy systems with time-delays. Applied Mathematics Letters, vol. 24, no. 12, pp. 1986–1994, 2011.
Y. Y. Wang, L. H. Xie, C. E. de Souza. Robust control of a class of uncertain nonlinear systems. Systems and Control Letters, vol. 19, no. 2, pp. 139–149, 1992.
X. R. Mao. Stochastic Differential Equations and Their Applications, Chichester, UK: Horwood Publishing, 1997.
V. B. Kolmanovskii, A. D. Myshkis. Applied Theory of Functional Differential Equations, Dordrecht, The Netherlands: Kluwer Academic Publishers, 1992.
Author information
Authors and Affiliations
Corresponding author
Additional information
P. Balasubramaniam post graduated from the Department of Mathematics of Gobi Arts College affiliated to Bharathiar University, Coimbatore in 1989. He received M. Phil. and Ph. D. degrees in mathematics with specialized area of control theory from the Department of Mathematics, Bharathiar University, Coimbatore, Tamilnadu, India in 1990, and 1994, respectively. He is rendering his services as a faculty from February 1997 at Department of Mathematics, Gandhigram Rural University, Gandhigram, Tamilnadu, India, and continuing as a professor and head since November 2006. To his credit, he has published more than 100 papers in various SCI indexed journals. In 2005, he received Tamilnadu Scientist Award for the contributions to mathematical sciences.
His research interests include the areas of control theory, soft computing, and neural networks.
T. Senthilkumar received the B.Sc. and M.Sc. degrees in mathematics from Arulmigu Palani Andavar College of Arts and Culture, Palani affiliated to madurai Kamaraj University, Madurai, India in 2002 and 2004, respectively. He obtained M. Phil. degree in mathematics with specialization in control theory from the Department of Mathematics, Government Arts College, affiliated to Bharathiar University Coimbatore, Tamilnadu, India in 2007 and B.Ed. degree in mathematics at Government College of Education, Orathanadu, Tamilnadu, India affiliated to Bharathidasan University in 2008. He received the Doctor of Philosophy (Ph. D.) in 2012 in the field of mathematics with specialized area of control theory from the Department of Mathematics, Gandhigram Rural University, Gandhigram, Tamilnadu, India. Currently, he is working as a lecturer in the Department of Mathematics, Gandhigram Rural University.
His research interests include fuzzy control, stochastic system, H∞ control, robust control, filtering, and guaranteed cost control.
Rights and permissions
About this article

Cite this article
Balasubramaniam, P., Senthilkumar, T. Delay-dependent Robust Stabilization and H∞ Control for Uncertain Stochastic T-S Fuzzy Systems with Discrete Interval and Distributed Time-varying Delays. Int. J. Autom. Comput. 10, 18–31 (2013). https://doi.org/10.1007/s11633-013-0692-2
Received:
Revised:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11633-013-0692-2