
Abstract
A system of equations that describe the static equilibrium of plasma in a magnetic field with three-dimensional magnetic surfaces of toroidal topology is obtained. The approach is based on the mixed representation for the magnetic field; the representation is similar to that used in the derivation of the classical Grad–Shafranov equation but modified with allowance for the possible axial asymmetry of magnetic surfaces. The system consists of three differential equations for three scalar functions; two of the equations can be written in the form of magnetic differential equations and the third one (the balance of forces in the direction perpendicular to the surface) serves as an analogue of the Grad–Shafranov equation. The obtained equations allow a simple transition to the limiting case of axial symmetry. An example of a solution of the Hill vortex type is presented under the assumption of weak axial asymmetry of the problem. The paper is dedicated to the memory of the brilliant physicist Vitaly D. Shafranov, who could think simply and very precisely.
Similar content being viewed by others

1 INTRODUCTION
The problem of finding equilibrium plasma configurations in a magnetic field is among the high-priority issues in the hierarchy of problems in plasma physics and its applications. The static equilibrium of plasma in the magnetic field is described by the equations
the first of which characterizes the balance between forces of pressure p and Ampère force, while the second one characterizes the solenoidity of the magnetic field B.
It is well known that the range of applicability of Eqs. (1) and (2), which have the typical magnetohydrodynamic form, is considerably wider than the scope of ideal magnetic hydrodynamics (MHD); for a comprehensive rationale, see [1].
Vector equation (1) is equivalent to three scalar equations, two of which are reduced to conditions of constancy of the pressure along the lines of current flow and magnetic field lines \((\operatorname{curl} {\mathbf{B}} \cdot \nabla p) = 0\), \(({\mathbf{B}} \cdot \nabla p) = 0\). As applied to the problem of laboratory confinement of high-temperature plasma, configurations that have nested magnetic surfaces that allow one (to some extent) to implement the initial Tamm–Sakharov idea about magnetic thermal insulation are of special importance. In such configurations, by superposing the boundary magnetic surface with the chamber wall we can avoid the ballistic transport of energy by plasma particles that move freely along the magnetic field lines from the main plasma volume to this wall, whereas processes of heat and mass transport transversely to the magnetic field lines are considerably slower. Although the character of these processes can differ from the classical thermal conductivity and diffusion, i.e., be related to the level of plasma turbulence to a greater extent than to collisions of particles, considering these difference is nevertheless meaningful only after providing the global balance of forces, i.e., plasma equilibrium. In other words, the hierarchy of processes determining in the long run the characteristic time of plasma confinement is as follows: equilibrium–stability–transport processes. That is why the merit of V.D. Shafranov, who was one of the first to construct an adequate theory of plasma equilibrium for practical systems of controlled thermonuclear fusion, is great.
Facilities of the tokamak and stellarator types are the best-known examples of such systems whose magnetic configurations are sets of nested surfaces. Topologically, magnetic surfaces in these systems are closed tori although only the tokamak surfaces can be actually called (axisymmetric) tori and even approximately due to the discreteness of the magnetic toroidal field coils.
For axisymmetric systems with nested magnetic surfaces \(\Psi ({\mathbf{r}}) = {\text{const}}\): \(({\mathbf{B}} \cdot \nabla \Psi ) = 0\), where r is the radius vector, the equilibrium theory has an especially elegant form. The main tool for the calculation of axisymmetric equilibrium magnetic configurations is the great Grad–Shafranov equation (GSE), which was obtained by V.D. Shafranov in 1957 [2] and, independently but almost a year later, by H. Grad [3].
V.D. Shafranov’s innovation that allowed him to obtain the GSE was to use the mixed representation for the magnetic field
Here, the function \(\Psi = \Psi (r,z)\) that serves as a label of the magnetic surface denotes the poloidal flux of the magnetic field; \(F = F(r,z)\) characterizes the poloidal current inside the toroidal surface with a given value of Ψ; and φ is the toroidal angle of the cylindrical coordinate system \({\mathbf{r}} = \{ r,\varphi ,z\} \) associated with the geometric center of the torus. Representation (3) can be obtained from the general representation of the magnetic field \({\mathbf{B}} = [\nabla \Psi \times \nabla {{\alpha }^{3}}] + [\nabla \Phi \times \nabla {{\alpha }^{2}}]\) (Φ is the toroidal flux of the magnetic field and \({{\alpha }^{2}}\), \({{\alpha }^{3}}\) are the poloidal and toroidal angular coordinates, respectively) [4, 5] by a simple transition from the contravariant notation of the second summand to the covariant notation; however, it satisfies the solenoidity condition only in the considered case of axial symmetry of the system. Representation (3) is called mixed because it contains both co- and contravariant notations of entering components.
In the case of axial symmetry, advantages of specifying the magnetic field in form (3) are evident because it makes it possible to automatically satisfy two conditions imposed on the magnetic field: \({\text{div}}{\mathbf{B}} \equiv 0\) and \(({\mathbf{B}} \cdot \nabla \Psi ) \equiv 0\). Here, three components of the magnetic field are determined by two scalar functions \(\Psi = \Psi (r,z)\) and \(F = F(r,z)\). The sought magnetic surfaces are the level surfaces of the function Ψ: \(\Psi (r,z) = {\text{const}}\). The following substitution of (3) into the force balance equation (1) and its projection onto the triplet of non-complanar vectors \([\nabla \Psi \times \nabla \varphi ]\), \(\nabla \varphi \), and \(\nabla \Psi \), lead to the conclusion that F and p are surface functions, \(p(r,z) = p(\Psi )\), \(F(r,z) = F(\Psi )\). It also results in the GSE itself as an equation for Ψ:
where
is the Grad–Shafranov operator. In the case of axial symmetry, \(\partial {\text{/}}\partial \varphi = 0\), it has the form
The second-order partial differential equation (4) for the function Ψ determines magnetic surfaces in an arbitrary axisymmetric plasma system being at static equilibrium in a magnetic field formed both by external currents and by currents flowing in the plasma itself. In spite of its deceptive simplicity, Eq. (4) is very nontrivial. First, it is nonlinear and admits bifurcations of equilibrium [6–10]; second, this is an elliptic-type equation; therefore, it has a solution in most reasonable situations.
Equation (4) is usually solved for Ψ at given dependences \(F(\Psi )\) and \(p(\Psi )\) under the assumption that one of the surfaces \(\Psi = {\text{const}}\) is a boundary, i.e., a zero pressure surface. An alternative for the calculation of equilibrium with the GSE is specifying the flux Ψ on a fixed boundary magnetic surface of a given shape. In this case, certainly, there is no guarantees that the system of magnetic surfaces is nested in the entire volume inside the boundary surface.
The approach invented by V.D. Shafranov, with the representation of the magnetic field in form (3), turned out to be massively fruitful. It can be also used for more complicated equations including dynamic quantities; in fact, it reduces complex three-dimensional vector equations of equilibrium to a single two-dimensional differential equation for the scalar function Ψ. There are known analogues of the GSE for describing the dynamic equilibrium [8, 11–14] and anisotropic equilibrium [1, 15], in particular, with flows [16–18]; relativistic GSEs [19, 20], GSE for Hall and the multicomponent MHD [21–23], etc. A wide range of different astrophysical generalizations of the Grad–Shafranov equation can be found in the review [24].
The key assumption in the derivation of the GSE, in addition to the assumption about the existence of magnetic surfaces, is the condition of the axial symmetry of the equilibrium, which significantly limits the class of problems under consideration. Attempts to formulate three-dimensional equilibrium equations were made many times (see, e.g., [1, 25]); however, a simple analogue of the classical axisymmetric GSE with preservation of the logic in the construction of a solution and admission of a direct transition to the axial symmetry limit (4) was obtained only for the case of helical symmetry of the system, which is in fact equivalent to the axisymmetric case with a change in the notation of the angular coordinates. In [26, 27], it was proposed to generalize the GSE for describing asymmetric MHD configurations. The generalization was based on the mixed representation for the magnetic field with the use of so-called reference vectors instead of \(\nabla \varphi \) in (3). This approach, within the framework of some additional assumptions, allowed one to write the equilibrium equation in a relatively simple form; the entire difficulty of the further analysis was transferred to finding the reference vectors that are not initially given and, in their turn, depend on \(\Psi ({\mathbf{r}})\). Herewith, the obtained equations are not a necessary condition for the equilibrium.
In the present work, following V.D. Shafranov’s approach with the mixed representation for the magnetic field with a given basis, we derive equations of three-dimensional equilibrium of plasma in a magnetic field with toroidal magnetic surfaces \(\Psi (r,\varphi ,z)\): \(({\mathbf{B}} \cdot \nabla \Psi ) = 0\). In the three-dimensional case, the solenoidity condition is not satisfied automatically; to ensure it, it is necessary to introduce an additional free function that calibrates the poloidal flux in the expression for the magnetic field. The remaining equations nevertheless do not lose their clarity and show a simple transition to the limiting axisymmetric case. The equation for F has the form of a magnetic differential equation and characterizes the inhomogeneity of the function \(r{{B}_{\varphi }}\) on the three-dimensional magnetic surface, while the equation for Ψ serves as an analogue of the GSE in the nonaxisymmetric case. The obtained form of the three-dimensional equilibrium equations seems to be the most convenient because, first, it preserves the logic of the classical GSE and, second, allows one to find solutions for three-dimensional magnetic surfaces in the form of functions of usual cylindrical coordinates without involving the apparatus of curvilinear coordinates and technique of straight magnetic field lines. An example of such a solution is presented in this paper for the case of “weak” axial asymmetry of magnetic surfaces.
This work is organized as follows. Section 2 presents the derivation of plasma equilibrium equations in systems with magnetic surfaces of the general form, i.e., without the assumption of axial symmetry. In Section 3, the obtained equations are simplified for the case of weak nonaxisymmetry of the system. In Section 4, a simple example of the solution of the simplified equations is constructed to demonstrate their solvability. The summary of the paper is given in the Conclusions.
2 BASIC EQUATIONS
According to the logic of the GSE, to reduce the problem of plasma equilibrium in the magnetic field to a scalar equation determining the shape of magnetic surfaces in the equilibrium plasma configuration, one should specify the form of B in terms of the surface function Ψ. The condition of currents closure is satisfied automatically by the expression \({\mathbf{j}} = c\operatorname{curl} {\mathbf{B}}{\text{/}}(4\pi )\) (j is the current density and c is the speed of light).
We mean that magnetic field lines lie on three-dimensional magnetic surfaces: \(({\mathbf{B}} \cdot \nabla \Psi (r,\varphi ,z)) = 0\). At that, as in the axisymmetric case, projection of the force balance equation (1) onto the direction of the magnetic field yields the constancy of the pressure p on the magnetic surface, \(p = p(\Psi )\).
It is evident that the mixed representation (3) is not suitable for describing a three-dimensional magnetic surface with \(\partial \Psi {\text{/}}\partial \varphi \ne 0\). Let us modify (3) by adding a summand with an arbitrary factor ν along the gradient of Ψ
We also introduce a free coefficient γ at the cross product \([\nabla \Psi \times \nabla \varphi ]\). Thus, representation (5) yields a decomposition of the vector B in three different directions: \([\nabla \Psi \times \nabla \varphi ]\), \(\nabla \varphi \), and \(\nabla \Psi \); therefore, the chosen representation describes a field with an arbitrary topology and does not restrict the generality of the consideration.
Further, we use the condition for the existence of the magnetic surface Ψ. From \(({\mathbf{B}} \cdot \nabla \Psi ) = 0\), the expression for the function ν follows:
Thus, the coefficient at \(\nabla \Psi \) in (5) is proportional to \(\partial \Psi {\text{/}}\partial \varphi \); in the axisymmetric case this summand vanishes.
The final expression for the magnetic field
contains three free functions γ, F, and Ψ, the number of which is one more than in the axisymmetric case; the condition \(({\mathbf{B}} \cdot \nabla \Psi ) = 0\) is satisfied identically.
The functions γ, F, and Ψ are determined by three equations: the solenoidity condition \({\text{div}}{\mathbf{B}} = 0\); the condition that the lines of the current lie on the magnetic surfaces, \((\operatorname{curl} {\mathbf{B}} \cdot \nabla \Psi ) = 0\); and projection of the force balance equation (1) onto \(\nabla \Psi \). It is convenient to rewrite the final system of equations using the function \({{F}^{ \star }} = F\left( {1 - \alpha \partial \Psi {\text{/}}\partial \varphi } \right)\) that characterizes the toroidal component of the magnetic field \({{B}_{\varphi }} = {{F}^{ \star }}{\text{/}}r\) and coincides with the function of the poloidal current in the axisymmetric case. We also introduce axisymmetric operators \(\Delta _{0}^{*}\) and \({{\nabla }_{0}} = \nabla - \nabla \varphi (\partial {\text{/}}\partial \varphi )\) and the squared magnetic field strength \({{B}^{2}} = ({{\gamma }^{2}}{\text{|}}{{\nabla }_{0}}\Psi {{{\text{|}}}^{2}} + \)\(F{{F}^{ \star }}){\text{/}}{{r}^{2}}\). Finally, we have
We come to a system of three differential equations for three free functions γ, F (or \({{F}^{ \star }}\)), and Ψ. Equa-tions (6) and (7) have the form of magnetic differential equations (MDEs), i.e., equations of the type \(({\mathbf{B}} \cdot \nabla f) = s\) that play an important role in the theory of plasma equilibrium in a magnetic field [28–30]. However, in contrast to the conventional MDE, for which the source s in the right-hand side is considered as a given function, the right-hand sides of Eqs. (6) and (7) contain unknown functions Ψ, F, and γ, which are to be determined.
In the absence of axial symmetry of the total plasma pressure, it immediately follows from Eq. (7) that the function \({{F}^{ \star }} = r{{B}_{\varphi }}\) is inhomogeneous on the three-dimensional magnetic surface: \({{F}^{ \star }} \ne {{F}^{ \star }}(\Psi )\). In the degenerate case \(F = 0\) (a purely poloidal magnetic field), instead of Eq. (6), we have \(\gamma = \gamma (\Psi ,\varphi )\) from the condition \({\text{div}}{\mathbf{B}} = 0\); Eq. (7) implies axial symmetry of the total plasma pressure \(\partial (p + {{B}^{2}}{\text{/}}8\pi ){\text{/}}\partial \varphi = 0\).
For an axisymmetric magnetic surface \(\partial \Psi {\text{/}}\partial \varphi = 0\), Eqs. (6)–(8) transfer into the system
which is reduced to the GSE at \(F = F(\Psi )\) and \(\gamma = \gamma (\Psi )\).
3 THE CASE OF WEAK AXIAL ASYMMETRY
Let us simplify the obtained system (6)–(8) for the case of weak axial asymmetry when the sought magnetic surface \(\Psi (r,\varphi ,z)\) can be represented as a combination of the axisymmetric part and a small additive periodical on φ:
Such situation is typical, e.g., for tokamaks with a weak toroidal ripple of the magnetic field, as well as for some astrophysical objects.
Let us choose F and γ in the form
In the chosen approximation, \({{F}^{ \star }} \approx F\).
Substitution of the expressions for F, γ, and Ψ into Eq. (8) results in the zero order with respect to ε in the classical GSE for the function \({{\Psi }_{0}}\):
Here and below, the subscript at \((dp{\text{/}}d\Psi )\) also denotes the order with respect to ε. Equation (6) in the zero order is satisfied identically; from Eq. (7) it follows that \({{F}_{0}} = {{F}_{0}}({{\Psi }_{0}})\).
In the first order with respect to ε, Eqs. (6)–(8) can be rewritten as
The further technique of solving the equilibrium equations in the case of weak axial asymmetry consists of choosing the zero (basic) solution for \({{\Psi }_{0}}\) that satisfies (9), i.e., any known solution of the classical axisymmetric GSE, and subsequent calculation of toroidal harmonics of the functions \({{\gamma }_{1}}\), \({{F}_{1}}\), and \({{\Psi }_{1}}\) from Eqs. (10)–(12). In the next section, as an example, this procedure is performed for the configuration similar to that described in [31] for axisymmetric case.
4 AN EXAMPLE OF A SOLUTION OF THE HILL VORTEX TYPE
As the basic configuration, π/2–3π/2 consider the solution of the axisymmetric GSE (9) with \({{F}_{0}} = 0\) and \(dp{\text{/}}d\Psi = {\text{const}} = - A{\text{/}}(4\pi )\). Equation \({{\Delta }^{*}}{{\Psi }_{0}} = A{{r}^{2}}\) has a solution
which describes closed toroidal configurations at \({{\Psi }_{0}}{\text{/}}{{\Psi }_{a}} > \) 0 [31]: \(p = 2{{\Psi }_{a}}(1 + {{k}^{2}})\Psi {\text{/}}(\pi {{R}^{4}}) + {\text{const}}\).
Setting \({{F}_{0}} = 0\), we seek the solution of system (10)–(12) in the form \({{\Psi }_{1}} = {{\Psi }_{c}}(r,z)\cos\varphi \), \({{F}_{1}} = {{F}_{s}}(r,z)\sin\varphi \), and \({{\gamma }_{1}} = {{\gamma }_{c}}(r,z)\cos\varphi \). Substitution of harmonics of the sought functions into (10)–(12) leads to two-dimensional equations that depend only on r and z
At \({{F}_{s}} \ne 0\), Eq. (14) can be considered as an equation for \({{F}_{s}}\). The two remaining equations, (15) for \({{\gamma }_{c}}\) and (16) for \({{\Psi }_{c}}\), constitute a system of coupled second-order partial differential equations; at that, Eq. (15) is an equation of the parabolic typeFootnote 1and Eq. (16) is an equation of the elliptic type, as is the GSE. As an example of its particular solution, one can take
Then, the expression for the magnetic surface has the form
We note that the obtained approximate solution yields a discrepancy of the order of \({{\varepsilon }^{2}}\) in the equations \({\text{div}}{\mathbf{B}} = 0\), \((\operatorname{curl} {\mathbf{B}} \cdot \nabla \Psi ) = 0\), and in the projection of the force balance equation onto \(\nabla \Psi \); at that, the condition \(({\mathbf{B}} \cdot \nabla \Psi ) = 0\) and the longitudinal force balance are satisfied exactly.
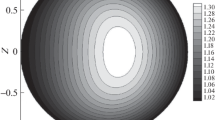
Toroidal cross sections of the level lines of function (17) and three-dimensional form of a closed magnetic surface are presented in Figs. 1 and 2, respectively. The obtained example of the solution of Eqs. (9)–(12) is the simplest generalization of the axisymmetric Hill vortex considered by Shafranov in [31].Footnote 2

The level lines of the function Ψ (17) at \({{k}^{2}} = 1\) and ε = 0.3 in the toroidal cross sections φ = 0–π and φ = π/2–3π/2. The black color shows the lines of \(\Psi = 0\); the dashed lines show the contour of the magnetic surface \(\Psi = 0.2{{\Psi }_{a}}\) presented in Fig. 2.

The magnetic surface \(\Psi = 0.2{{\Psi }_{a}}\) described by expression (17) at \({{k}^{2}} = 1\) and ε = 0.3; \(x = r\cos\varphi \), \(y = r\sin\varphi \). The toroidal cross sections of this magnetic surface are shown in Fig. 1 by dashed lines.
5 CONCLUSIONS
Following V.D. Shafranov’s approach and using the mixed representation for the magnetic field, we obtained Eqs. (6)–(8) that describe the equilibrium plasma configuration with three-dimensional toroidal magnetic surfaces \(\Psi = \Psi (r,\varphi ,z)\). The magnetic field is specified by three interrelated functions: by function γ that calibrates the poloidal flux, by function \({{F}^{ \star }}\) result in conditions specifies the toroidal magnetic field, and by the label of the magnetic surface Ψ. In the limit of axial symmetry, the equations for γ and \({{F}^{ \star }}\) result in conditions \(\gamma = \gamma (\Psi )\), \(F = F(\Psi )\), and Eq. (8) transfers into the GSE. Thus, Eq. (8) should be considered as an analogue of the GSE for a nonaxisymmetric magnetic surface.
We note that two of the obtained equations, namely, Eqs. (6) and (7) for γ and \({{F}^{ \star }}\), are written in the form of the MDE. The latter demonstrates a strong relation between the variation of function \({{F}^{ \star }} = r{{B}_{\varphi }}\) on the magnetic surface and toroidal asymmetry of the total plasma pressure in the magnetic field: \({\mathbf{B}} \cdot \nabla {{F}^{ \star }} = 4\pi {{r}^{2}}\partial (p + {{B}^{2}}{\text{/}}8\pi ){\text{/}}\partial \varphi \). In particular, from this it follows that F in the three-dimensional case is not a function of the magnetic surface, in contrast to the degenerate case of axial symmetry.
Notes
It is easy to demonstrate that the characteristic quadratic form of Eq. (15) after the substitution of \({{F}_{s}}\) from (14) has the form \(Q\left( {\frac{{\partial {{\gamma }_{c}}}}{{\partial r}},\frac{{\partial {{\gamma }_{c}}}}{{\partial z}}} \right) = \mathop {\left( {\frac{{\partial {{\Psi }_{0}}}}{{\partial z}}} \right)}\nolimits^2 \frac{{{{\partial }^{2}}{{\gamma }_{c}}}}{{\partial {{r}^{2}}}} - 2\frac{{\partial {{\Psi }_{0}}}}{{\partial r}}\frac{{\partial {{\Psi }_{0}}}}{{\partial z}}\frac{{{{\partial }^{2}}{{\gamma }_{c}}}}{{\partial r\partial z}} + \mathop {\left( {\frac{{\partial {{\Psi }_{0}}}}{{\partial r}}} \right)}\nolimits^2 \frac{{{{\partial }^{2}}{{\gamma }_{c}}}}{{\partial {{z}^{2}}}}\) and has a zero discriminant.
The set of magnetic surfaces (17) is a formal solution of Eqs. (9)–(12) obtained under the condition dp/dΨ = const. At that, only the volume inside the surface bounded in all toroidal cross-sections (as the surface shown in Fig. 2) has the physical meaning as a plasma confinement region. Outside that region the magnetic configuration should be described by the solution of the “vacuum” problem.
REFERENCES
L. E. Zakharov and V. D. Shafranov, in Reviews of Plasma Physics, Ed. by M. A. Leontovich and B. B. Ka-domtsev (Consultants Bureau, New York, 1986), Vol. 11, p. 153.
V. D. Shafranov, Sov. Phys. JETP 6, 545 (1958).
H. Grad and H. Rubin, in Proceedings of the Second United Nations Conference on the Peaceful Uses of Atomic Energy, Geneva,1958 (United Nations, Geneva, 1958), p. 190.
A. H. Boozer, Phys. Fluids 26, 1288 (1983).
V. I. Ilgisonis and A. A. Skovoroda, JETP 110, 890 (2010).
J. Y. Hsu and M. S. Chu, Phys. Fluids 30, 1221 (1987).
E. Lazzaro and S. V. Shchepetov, Phys. Lett. A 143, 393 (1990).
V. I. Ilgisonis and Yu. I. Pozdnyakov, Plasma Phys. Rep. 28, 83 (2002).
E. R. Solano, Plasma Phys. Controlled Fusion 46, L7 (2004).
L. E. Zakharov, A. I. Smolyakov, and A. A. Subbotin, Plasma Phys. Rep. 16, 451 (1990).
E. Hameiri, Phys. Fluids 26, 230 (1983).
H. Tasso and G. N. Throumoulopoulos, Phys. Plasmas 5, 2378 (1998).
J. P. Goedbloed and A. J. C. Belien, Phys. Plasmas 11, 28 (2004).
L. Guazzotto and R. Betti, Phys. Plasmas 12, 056107 (2005).
H. Grad, Phys. Fluids 210, 137 (1967).
R. Iacono, A. Bondeson, F. Troyon, and R. Gruber, Phys. Fluids B 2, 1794 (1990).
V. I. Ilgisonis, Phys. Plasmas 3, 4577 (1996).
V. I. Ilgisonis, Classical Problems in the Physics of Hot Plasmas (Izd. dom MEI, Moscow, 2015) [in Russian].
I. Okamoto, Mon. Not. R. Astron. Soc. 173, 357 (1975).
M. Anderson, Mon. Not. R. Astron. Soc. 239, 19 (1989).
L. C. Steinhauer, Phys. Plasmas 6, 2734 (1999).
V. I. Ilgisonis, Plasma Phys. Controlled Fusion 43, 1255 (2001).
A. Thyagaraja and K. G. McClements, Phys. Plasmas 13, 062502 (2006).
V. S. Beskin, Stationary Axisymmetric Flows in Astrophysics (Fizmatlit, Moscow, 2006) [in Russian].
V. D. Pustovitov and V. D. Shafranov, in Reviews of Plasma Physics, Ed. by B. B. Kadomtsev (Consultants Bureau, New York, 1990), Vol. 15, p. 163.
L. M. Degtyarev, V. V. Drozdov, M. I. Mikhailov, V. D. Pustovitov and V. D. Shafranov, Sov. J. Plasma Phys. 11, 22 (1985).
R. Gruber, L. M. Degtyarev, A. Kuper, A. A. Martynov, S. Yu. Medvedev, and V. D. Shafranov, Plasma Phys. Rep. 22, 186 (1996).
L. S. Solov’ev and V. D. Shafranov, in Reviews of Plasma Physics, Ed. by M. A. Leontovich (Consultants Bureau, New York, 1970), Vol. 5, p. 1.
M. D. Kruskal and R. M. Kulsrud, Phys. Fluids 1, 265 (1958).
W. A. Newcomb, Phys. Fluids 2, 362 (1959).
V. D. Shafranov, in Reviews of Plasma Physics, Ed. by M. A. Leontovich (Consultants Bureau, New York, 1966), Vol. 2, p. 103.
Funding
The work was partly supported by the Russian Foundation for Basic Research, project no. 18-29-21041.
Author information
Authors and Affiliations
Corresponding author
Additional information
Translated by A. Nikol’skii
Rights and permissions
About this article

Cite this article
Sorokina, E., Ilgisonis, V. Equations of Plasma Equilibrium in a Magnetic Field with Three-Dimensional Magnetic Surfaces. Plasma Phys. Rep. 45, 1093–1098 (2019). https://doi.org/10.1134/S1063780X19120080
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1134/S1063780X19120080