
Abstract
The convergence balls as well as the dynamical characteristics of two sixth order Jarratt-like methods (JLM1 and JLM2) are compared. First, the ball analysis theorems for these algorithms are proved by applying generalized Lipschitz conditions on derivative of the first order. As a result, significant information on the radii of convergence and the regions of uniqueness for the solution are found along with calculable error distances. Also, the scope of utilization of these algorithms is extended. Then, we compare the dynamical properties, using the attraction basin approach, of these iterative schemes. At the end, standard application problems are considered to demonstrate the efficacy of our theoretical findings on ball convergence. For these problems, the convergence balls are computed and compared. From these comparisons, it is confirmed that JLM1 has the bigger convergence balls than JLM2. Also, the attraction basins for JLM1 are larger in comparison to JLM2. Thus, for numerical applications, JLM1 is better than JLM2.
Similar content being viewed by others

1 Introduction
Let \({\mathscr {Z}}_1\) and \({\mathscr {Z}}_2\) denote Banach spaces. Consider a convex and open subset \({\mathscr {H}} (\not = \emptyset )\) of \({\mathscr {Z}}_1\). Suppose \(BL({\mathscr {Z}}_1, {\mathscr {Z}}_2)\) stands for the set \(\{L_B: {\mathscr {Z}}_1 \rightarrow {\mathscr {Z}}_2 \ \text {linear and bounded operators}\}\). Define the following equation for a Fréchet derivable operator \(F:{\mathscr {H}} \subseteq {\mathscr {Z}}_1 \rightarrow {\mathscr {Z}}_2\) by
Nonlinear equations of the above form (1.1) are often used to tackle various challenging tasks that appear in many disciplines of science and other applied topics. The analytical solution denoted by \(b_*\) of equation (1.1) can be found only in rare instances. This is why nonlinear equations are typically solved iteratively to find an approximate solution. Generally, constructing highly effective iterative procedures to produce the solutions of these equations is a tough responsibility. The most often used method for this problem is the traditional Newton’s iterative approach. Additionally, a lot of researchers have been designing higher order modifications of conventional procedures like Newton’s, Chebyshev’s, Jarratt’s, etc. [1,2,3, 5,6,7, 9, 11,12,17, 21, 23, 25,26,27, 31]. Kou and Li [18] presented a sixth order variant of Jarratt’s algorithm to address nonlinear equations in \({\mathbb {R}}\). They added Newton’s iterate as the third step in Jarratt’s iterate and used linear interpolation formula to eliminate the additional evaluation of the first derivative. Another modification of Jarratt’s method is designed in [33]. This method needs two evaluations of the function and two of its first derivatives per iteration. Cordero et al. [12] proposed an efficient family of nonlinear system solvers using a reduced composition technique on Newton’s and Jarratt’s algorithm. This family is given for an initial choice \(b_0 \in {\mathscr {H}}\) by
where \(\alpha _1\) and \(\alpha _2\) are real parameters. Further, Soleymani composed Newton’s procedure in Jarratt’s one and used Taylor expansion technique to derive a sixth order method. Two new families of Jarratt-type algorithms with sixth order convergence are studied in [30]. Sharma and Arora [25] constructed iterative algorithms of fourth and sixth convergence order for solving nonlinear systems. Two Jarratt-like steps are used to obtain the fourth order method and the sixth order algorithm is the composition of three Jarratt-like steps. The sixth order iterative procedure for a starter \(b_0 \in {\mathscr {H}}\) is written as follows.
Additional studies on Jarratt-like and other iterative processes with their dynamics and convergence are available in [4, 8, 10, 19, 20, 22, 24, 28, 32].
In this work, we are particularly focused on two sixth convergence order Jarratt-like solvers (JLM1 and JLM2) discussed by Soleymani et al. [29]. For an initial point \(b_0 \in {\mathscr {H}}\), these solvers are expressed as follows.
JLM1:
JLM2:
Taylor’s expansion formula and conditions on derivatives of the seventh order have been used in [29] to prove their convergence. Such results make these solvers very hard to use, since their usefulness is minimized due to the assumptions on derivatives of higher order. To illustrate this, we have chosen
where \({\mathscr {Z}}_1={\mathscr {Z}}_2={\mathbb {R}}\) and F is defined on \({\mathscr {H}}=[-\frac{1}{2}, \frac{3}{2}]\). Then, it is worth mentioning that the previously established theorems for the convergence of JLM1 and JLM2 do not apply to this case, since the third derivative of F is not bounded. Besides this, these convergence findings yield little information about \(||b_n-b_*||\), the convergence ball and the exact position of the solution \(b_*\). The analysis of ball convergence of an iterative algorithm is essential for estimating the radii of convergence balls, establishing error limits, and evaluating the uniqueness area for \(b_*\). Notably, the consequences of the ball analysis are highly helpful, since they demonstrate the degree of difficulty in choosing starting choices. This inspires us to analyze and compare the convergence balls of JLM1 and JLM2 using conditions only on \(F'\). Our convergence findings enable the calculation of convergence radii and estimation of error \(||b_n-b_*||\), as well as provide a precise location of \(b_*\).
The arrangement of this paper can be described by summarizing the remainder of the text into the following statements. In Sect. 2, the analytical results on the ball convergence of JLM1 and JLM2 are described. Section 3 compares the attraction basins for these algorithms. Section 4 contains numerical applications. Concluding remarks are discussed at the end of this paper.
2 Ball convergence analysis
We first study the ball convergence of JLM1 using some real valued functions. Set \(Q=[0, \infty )\).
Suppose equation
has a least solution \(\rho _0 \in Q{\setminus } \{0\}\) for some function \(\delta _0:Q \rightarrow Q\) continuous and non-decreasing. Set \(Q_0=[0, 2\rho _0)\).
Suppose equation
has a least solution \(r_1 \in (0, \rho _0)\), for some functions \(\delta : Q_0 \rightarrow Q\) and \(\delta _1: Q_0 \rightarrow Q\) continuous and non-decreasing, where
Suppose equation
has a least solution \(\rho _p \in (0, \rho _0)\), where
Set \(\rho _1= \min \{\rho _0, \rho _p \}\) and \(Q_1=[0, \rho _1)\).
Suppose equation
has a least solution \(r_2 \in (0, \rho _1)\), where \({\mathscr {M}}_2:Q_1 \rightarrow Q\) is given by
Suppose equation
has a least solution \(\rho _2 \in (0, \rho _0)\). Set \(\rho = \min \{\rho _1, \rho _2 \}\) and \(Q_2=[0, \rho )\).
Suppose equation
has a least solution \(r_3 \in (0, \rho )\), where \({\mathscr {M}}_3:Q_2 \rightarrow Q\) is given by
We shall show that
is a radius of convergence for JLM1.
Definition (2.7) implies that for all \(t \in [0, r)\)
and
The notations \(B(b_*, \epsilon )\), \({\overline{B}}(b_*, \epsilon )\) stand for the open and closed balls in \({\mathscr {Z}}_1\) with center \(b_* \in {\mathscr {Z}}_1\) and of radius \(\epsilon >0\).
The conditions (C) are needed with functions \(``\delta "\) as developed previously. Assume:
\((C_1)\) \(F:{\mathscr {H}} \rightarrow {\mathscr {Z}}_2\) is continuously differentiable and \(b_*\) is a simple solution of equation \(F(b)=0\).
\((C_2)\) \(||F'(b_*)^{-1}(F'(b)-F'(b_*))||\le \delta _0(||b-b_*||)\)
for all \(b \in {\mathscr {H}}\).
Set \({\mathscr {H}}_0={\mathscr {H}} \cap B(b_*, \rho _0)\).
\((C_3)\) \(||F'(b_*)^{-1}(F'(a)-F'(b))||\le \delta (||a-b||)\)
and
\(||F'(b_*)^{-1}F'(b)||\le \delta _1(||b-b_*||)\)
for all \(b, a \in {\mathscr {H}}_0\).
\((C_4)\) \({\overline{B}}(b_*, R)\subset {\mathscr {H}}\) for some \(R>0\) to be determined.
\((C_5)\) There exists \(r_*\ge R\) such that
Set \({\mathscr {H}}_1={\mathscr {H}} \cap {\overline{B}}(b_*, r_*)\).
The convergence analysis of JLM1 follows based on conditions (C) with the developed notation.
Theorem 2.1
Under the conditions (C) with \(R=r\), further choose \(b_0 \in B(b_*, r){\setminus } \{b_*\}\). Then, sequence \(\{b_n\}\) exists in \(B(b_*, r)\), stays in \(B(b_*, r)\) for all \(n=0\), \({\lim _{n \rightarrow \infty } b_n=b_*}\),and
and
where functions \(''{\mathscr {M}}_i''\) are as before and radius r is given in (2.7).
Proof
Inequalities (2.12)–(2.14) are proved using induction on k. Using (2.7), (2.8), \((C_1)\) and \((C_2)\), we get in turn that for \(v \in B(b_*, r){\setminus } \{b_*\}\)
Estimate (2.15) and the lemma by Banach on linear invertible operators [3, 7] imply \(F'(v)^{-1}\) exists with
We also have \(a_0\) exists and is given by the first substep of JLM1 for \(n=0\). Moreover, we can have
By (2.7), (2.11) (for \(i=1\)), (2.16) (for \(v=b_0\)), \((C_3)\) and (2.17), we have in turn that
showing \(a_0 \in B(b_*, r)\) and (2.12) for \(n=0\).
Next, we show that linear operator \(3F'(a_0)-F'(b_0)\) is invertible. Indeed, using (2.7), (2.9), \((C_2)\) and (2.18), we obtain in turn that
so
We also have that \(z_0\) exists by the second substep of JLM1 for \(n=0\), from which we can write
In view of (2.7), (2.11) (for \(i=2\)), (2.16) (for \(v=b_0\)) and (2.18–2.20), we get in turn that
showing \(z_0 \in B(b_*, r)\) and (2.13) for \(n=0\).
Furthermore, notice that \(b_1\) is well defined by the third substep of JLM1, from which we can also write
Then, by (2.7), (2.11) (for \(i=3\)), (2.16) (for \(u=b_0, z_0\)), (2.18), (2.21) and (2.22), we obtain in turn that
showing \(b_1 \in B(b_*, r)\) and (2.14) for \(n=0\). The induction for inequalities (2.12)–(2.14) is terminated, if we replace \(b_0, a_0, z_0, b_1\) by \(b_k, a_k, z_k, b_{k+1}\) in the previous calculations. It then follows from the estimate
where \(\Delta ={\mathscr {M}}_3(||b_0-b_*||) \in [0, 1)\) that \(b_{k+1} \in B(b_*, r)\) and \({\lim _{k \rightarrow \infty } b_k=b_*}\). Next, set \(G=\int _{0}^{1}F'(b_*+\sigma (u-b_*))\ \mathrm{{d}}\sigma \) for \(u \in {\mathscr {H}}_1\) with \(F(u)=0\). By \((C_2)\) and \((C_5)\), we have in turn that
so \(u=b_*\) follows from the estimate \(0=F(u)-F(b_*)=G(u-b_*)\). \(\square \)
Next, we present the local convergence analysis of JLM2 along the same lines. Let us introduce function
Suppose equation
has a least solution \(\overline{r_3} \in (0, r_1)\).
Set
We shall show \({\overline{r}}\) is a radius of convergence for JLM2.
The following estimations are needed
so
showing \(b_{n+1} \in B(b_*, {\overline{r}})\) and (2.14) for \(n=0\) (for \({\mathscr {M}}_3=\overline{{\mathscr {M}}_3}\) and \(r=\rho ={\overline{r}}\)), where we used
so
so
Hence, we arrived at the following local convergence result for JLM2.
Theorem 2.2
Under the conditions (C) for \(R={\overline{r}}\), the conclusions of Theorem 1 ***hold for JLM2 with \(\overline{{\mathscr {M}}_3}, {\overline{r}}, \overline{r_*}\) replacing \({\mathscr {M}}_3, r, r_*\), respectively.
Remark 2.3
In existing research works on iterative algorithms, the assumption
is used instead of the condition \(||F'(b_*)^{-1}(F'(b)-F'(a))|| \le \delta (||b-a||), \ {\text{ f }or \ all} \ b, a \in {\mathscr {H}}_0\). But then, since \({\mathscr {H}}_0 \subseteq {\mathscr {H}}\), we have
This is a significant achievement. All earlier works can be rewritten in terms of \(\delta \), since the iterates belong to \({\mathscr {H}}_0\) which is a more accurate location about the iterates \(b_n\). This enhances the radius of convergence ball; tightens the upper error distances \(||b_n-b_*||\) and offers a better knowledge about \(b_*\). If we look at the example \(F(b)=e^b-1\) for \({\mathscr {H}}=B(0,1)\), then we have
and using Rheinboldt or Traub [23, 31] (for \(\delta _0=\delta ={\overline{\delta }}\)) we get \(R_{TR}=0.242529\). Moreover, Argyros et al. [3, 6] (for \(\delta ={\overline{\delta }}\)), estimated \(R_E=0.324947\). But under the proposed analysis \(r_1=0.382692\), so
3 Comparison of attraction basins
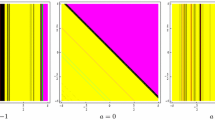
To compare the dynamical properties of JLM1 and JLM2, we apply the well-known attraction basin approach. For a second or higher degree complex polynomial \({\mathscr {A}}(z)\), the set of points \(\{z_0 \in {\mathbb {C}}: z_j \rightarrow z_*\ as\ j \rightarrow \infty \}\) forms the attraction basin corresponding to a zero \(z_*\) of \({\mathscr {A}}\), where \(\{z_j\}_{j=0}^{\infty }\) is constructed by an iterative formula starting from \(z_0 \in {\mathbb {C}}\). Let us consider an area \({\mathscr {E}} =[-4, 4]\) \(\times \) \([-4, 4]\) on \({\mathbb {C}}\) with a grid of \(400 \times 400\) points. To prepare attraction basins, we apply JLM1 and JLM2 on various polynomials by employing each point \(z_0 \in {\mathscr {E}}\) as an initial estimation. The point \(z_0\) belongs to the basin of a zero \(z_*\) of a considered polynomial if \(\displaystyle {\lim _{j \rightarrow \infty } z_j=z_*}\). We demonstrate the starter \(z_0\) using a typical color corresponding to \(z_*\). According to the number of iterations, we apply the light to dark colors to every \(z_0\). Black color is used to indicate the non-convergence regions. The condition to terminate the iteration process is \(||z_j-z_*|| < 10^{-6}\) with maximum 400 iterations. With the help of MATLAB 2019a, the fractal diagrams are produced.

Comparison of attraction basins associated to second degree polynomial \({\mathscr {A}}_{1}(z)=z^2-1\)

Comparison of attraction basins corresponding to second degree polynomial \({\mathscr {A}}_{2}(z)=z^2-z-1\)

Comparison of attraction basins associated to third degree polynomial \(\mathscr {A}_{3}(z)=z^3-1\)

Comparison of attraction basins related to third degree polynomial \({\mathscr {A}}_{4}(z)=z^3-(-0.7250+1.6500i)z-0.275-1.65i\)

Comparison of attraction basins associated to fourth degree polynomial \({\mathscr {A}}_{5}(z)=z^4-1\)

Comparison of attraction basins related to fourth degree polynomial \({\mathscr {A}}_{6}(z)=z^4-10z^2+9\)

Comparison of attraction basins associated to fifth degree polynomial \({\mathscr {A}}_{7}(z)=z^5-1\)

Comparison of attraction basins corresponding to fifth degree polynomial \({\mathscr {A}}_{8}(z)=z^5+z\)

Comparison of attraction basins associated to sixth degree polynomial \({\mathscr {A}}_{9}(z)=z^6-1\)
First of all, polynomials \({\mathscr {A}}_{1}(z)=z^2-1\) and \({\mathscr {A}}_{2}(z)=z^2-z-1\) of degree two are used to compare the attraction basins for JLM1 and JLM2. The comparison results are shown in Figs. 1 and 2. In Fig. 1, green and pink areas indicate the attraction basins corresponding to the zeros \(-1\) and 1, respectively, of \({\mathscr {A}}_{1}(z)\). The basins related to the solutions \(\frac{1+\sqrt{5}}{2}\) and \(\frac{1-\sqrt{5}}{2}\) of \({\mathscr {A}}_{2}(z)=0\) are displayed in Fig. 2 using pink and green colors, respectively. Figs. 3 and 4 provide the attraction basins for JLM1 and JLM2 associated to the zeros of \({\mathscr {A}}_{3}(z)=z^3-1\) and \({\mathscr {A}}_{4}(z)=z^3-(-0.7250+1.6500i)z-0.275-1.65i\). In Fig. 3, the basins of the solutions \(-\frac{1}{2}-0.866025i\), 1 and \(-\frac{1}{2}+0.866025i\) of \({\mathscr {A}}_{3}(z)=0\) are shown in blue, green and pink, respectively. The basins for JLM1 and JLM2 related to the zeros 1, \(-1.401440+0.915201i\) and \(0.4014403-0.915201i\) of \({\mathscr {A}}_{4}(z)\) are displayed in Fig. 4 by means of green, pink and blue regions, respectively. Next, polynomials \({\mathscr {A}}_{5}(z)=z^4-1\) and \({\mathscr {A}}_{6}(z)=z^4-10z^2+9\) of degree four are used to compare the attraction basins for JLM1 and JLM2. Fig. 5 shows the comparison of basins for these schemes associated to the solutions 1, \(-i\), i and 1 of \({\mathscr {A}}_{5}(z)=0\) are denoted in yellow, green, pink and blue regions. The basins for for JLM1 and JLM2 corresponding to the zeros \(-1\), 3, \(-3\) and 1 of \({\mathscr {A}}_{6}(z)\) are presented in Fig. 6 using yellow, pink, green and blue colors, respectively. Furthermore, we take polynomials \({\mathscr {A}}_{7}(z)=z^5-1\) and \({\mathscr {A}}_{8}(z)=z^5+z\) of degree five to design the attraction basins for JLM1 and JLM2. Fig. 7 provides the basins of zeros of 1, \(0.309016+0.951056i\), \(0.309016-0.951056i\), \(-0.809016+0.587785i\) and \(-0.809016-0.587785i\) of \({\mathscr {A}}_{7}(z)\) in cyan, red, yellow, pink and green colors, respectively. In Fig. 8, green, cyan, red, pink and yellow regions indicate the attraction basins of the solutions \(-0.707106-0.707106i\), \(-0.707106+0.707106i\), \(0.707106+0.707106i\), \(0.707106-0.707106i\) and 0, respectively, of \({\mathscr {A}}_{8}(z)=0\). Finally, degree six complex polynomials \({\mathscr {A}}_{9}(z)=z^6-1\) and \({\mathscr {A}}_{10}(z)=z^6+z\) are taken. In Fig. 9, the attraction basins for JLM1 and JLM2 associated to the zeros \(-0.500000-0.866025i\), \(-1\), \(0.500000-0.866025i\), 1, \(0.500000+0.866025i\) and \(-0.500000+0.866025i\) of \({\mathscr {A}}_{9}(z)\) are displayed in pink, green, yellow, red, cyan and blue colors, respectively. In Fig. 10, green, pink, red, yellow, cyan and blue colors are applied to illustrate the basins associated to the solutions \(-1.134724\), \(0.629372-0.735755i\), 0.7780895, \(-0.451055-1.002364i\), \(0.629372+0.735755i\) and \(-0.451055+1.002364i\) of \({\mathscr {A}}_{10}(z)=0\), respectively.
It is noticed from Figs. 1, 2, 3, 4, 5, 6, 7, 8, 9 and 10 that JLM1 has the bigger attraction basins in comparison to JLM2. Also, JLM1 shows less chaotic behavior than JLM2 on the boundary points of these basins. Hence, the numerical stability of JLM1 is higher than JLM2.

Comparison of attraction basins related to sixth degree polynomial \({\mathscr {A}}_{10}(z)=z^6+z\)
4 Numerical examples
We apply the proposed techniques to estimate the convergence radii of JLM1 and JLM2.
Example 4.1
Let us consider \({\mathscr {Z}}_1={\mathscr {Z}}_2=C[0, 1]\) and \({\mathscr {H}}={\overline{S}}(0, 1)\). Define F on \({\mathscr {H}}\) by
where \(b(a) \in C[0, 1]\). We have \(b_*=0\). Also, \(\delta _0(t)=7.5t\), \(\delta (t)=15t\) and \(\delta _1(t)=2\). The values of r and \({\overline{r}}\) are produced by the application of proposed theorems and summarized in Table 1.
Example 4.2
Let \({\mathscr {Z}}_1={\mathscr {Z}}_2={\mathbb {R}}^3\) and \({\mathscr {H}}={\overline{S}}(0, 1)\). Consider F on \({\mathscr {H}}\) for \(b=(b_1, b_2, b_3)^{t}\) as
We have \(b_*=(0, 0, 0)^t\). Also, \(\delta _0(t)=(e-1)t\), \(\delta (t)=e^{\frac{1}{e-1}}t\) and \(\delta _1(t)=2\). Using the newly proposed theorems the values of r and \({\overline{r}}\) are calculated and displayed in Table 2.
Example 4.3
Finally, the motivational problem described in the first section is addressed with \(b_*=0\), \(\delta _0(t)=\delta (t)=96.662907t\) and \(\delta _1(t)=2\). We apply the suggested theorems to compute r and \({\overline{r}}\). These values are shown in Table 3.
5 Conclusions
The convergence balls of two sixth order Jarratt-like equation solvers (JLM1 and JLM2) are compared. For the ball analysis results, the first derivative and generalized Lipschitz conditions are used. The complex dynamical characteristics of these algorithms are also compared via the attraction basin approach. It is seen that JLM1 has the bigger basins than JLM2. Finally, the new analytical outcomes are validated on numerical problems. We obtained that JLM1 has the larger convergence balls in comparison to JLM2.
References
Amat, S.; Busquier, S.: Advances in Iterative Methods for Nonlinear Equations. Springer, Cham (2016)
Argyros, I.K.: Computational Theory of Iterative Methods. CRC Press, New York (2007)
Argyros, I.K.: Convergence and Application of Newton-Type Iterations. Springer, Berlin (2008)
Argyros, I.K.: Unified convergence criteria for iterative Banach space methods with applications. Mathematics 9(16), Article Number: 1942 (2021)
Argyros, I.K.: The Theory and Application of Iteration Methods. Engineering Series, 2nd edn CRC Press, Boca Raton (2022)
Argyros, I.K.; Hilout, S.: Weaker conditions for the convergence of Newton’s method. J. Complex. 28, 364–387 (2012)
Argyros, I.K.; George, S.: Mathematical Modeling for the Solution of Equations and Systems of Equations with Applications, vol. IV. Nova Publisher, New York (2020)
Argyros, I.K.; Magreñán, Á.A.: Iterative Methods and Their Dynamics with Applications: A Contemporary Study. CRC Press, New York (2017)
Argyros, I.K.; Magreñán, Á.A.: A Contemporary Study of Iterative Methods. Elsevier, New York (2018)
Argyros, I.K.; Sharma, D.; Argyros, C.I.; Parhi, S.K.; Sunanda, S.K.: Extended iterative schemes based on decomposition for nonlinear models. J. Appl. Math. Comput. 68, 1485–1504 (2021). https://doi.org/10.1007/s12190-021-01570-5
Cordero, A.; Torregrosa, J.R.: Variants of Newtons method using fifth-order quadrature formulas. Appl. Math. Comput. 190, 686–698 (2007)
Cordero, A.; Hueso, J.L.; Martínez, E.; Torregrosa, J.R.: A modified Newton–Jarratt’s composition. Numer. Algor. 55(1), 87–99 (2010)
Cordero, A.; García-Maimó, J.; Torregrosa, J.R.; Vassileva, M.P.: Solving nonlinear problems by Ostrowski–Chun type parametric families. J. Math. Chem. 53(1), 430–449 (2015)
Grau-Sánchez, M.; Gutiérrez, J.M.: Zero-finder methods derived from Obreshkovs techniques. Appl. Math. Comput. 215, 2992–3001 (2009)
Grau-Sánchez, M.; Noguera, M.; Amat, S.: On the approximation of derivatives using divided difference operators preserving the local convergence order of iterative methods. J. Comput. Appl. Math. 237(1), 363–372 (2013)
Hueso, J.L.; Martínez, E.; Torregrosa, J.R.: Third and fourth order iterative methods free from second derivative for nonlinear systems. Appl. Math. Comput. 211, 190–197 (2009)
Jarratt, P.: Some fourth order multipoint iterative methods for solving equations. Math. Comput. 20(95), 434–437 (1966)
Kou, J.; Li, Y.: An improvement of the Jarratt method. Appl. Math. Comput. 189(2), 1816–1821 (2007)
Magreñán, Á.A.: Different anomalies in a Jarratt family of iterative root-finding methods. Appl. Math. Comput. 233, 29–38 (2014)
Neta, B.; Scott, M.; Chun, C.: Basins of attraction for several methods to find simple roots of nonlinear equations. Appl. Math. Comput. 218, 10548–10556 (2012)
Petković, M.S.; Neta, B.; Petković, L.; Dz̃unić, D.: Multipoint Methods for Solving Nonlinear Equations. Elsevier, Amsterdam (2013)
Ren, H.; Wu, Q.; Bi, W.: New variants of Jarratt’s method with sixth-order convergence. Numer. Algor. 52(4), 585–603 (2009)
Rheinboldt, W.C.: An adaptive continuation process for solving systems of nonlinear equations. In: Tikhonov, A.N., et al. (eds.) Mathematical Models and Numerical Methods, vol. 3, pp. 129–142. Banach Center, Warsaw (1978)
Sharma, D.; Parhi, S.K.; Sunanda, S.K.: Extending the convergence domain of deformed Halley method under \(\omega \) condition in Banach spaces. Bol. Soc. Mat. Mex. 27(2), Article number: 32 (2021). https://doi.org/10.1007/s40590-021-00318-2
Sharma, J.R.; Arora, H.: Efficient Jarratt-like methods for solving systems of nonlinear equations. Calcolo 51, 193–210 (2014)
Sharma, J.R.; Arora, H.; Petković, M.S.: An efficient derivative free family of fourth order methods for solving systems of nonlinear equations. Appl. Math. Comput. 235, 383–393 (2014)
Sharma, J.R.; Guna, R.K.; Sharma, R.: An efficient fourth order weighted-Newton method for systems of nonlinear equations. Numer. Algor. 62(2), 307–323 (2013)
Soleymani, F.: Revisit of Jarratt method for solving nonlinear equations. Numer. Algor. 57(3), 377–388 (2010)
Soleymani, F.; Lotfi, T.; Bakhtiari, P.: A multi-step class of iterative methods for nonlinear systems. Optim. Lett. 8, 1001–1015 (2014)
Thukral, R.: Further development of Jarratt method for solving nonlinear equations. Adv. Numer. Anal. 2012(Article ID: 493707), 1–9 (2012)
Traub, J.F.: Iterative Methods for Solution of Equations. Prentice-Hall, Upper Saddle River (1964)
Wang, X.; Kou, J.; Li, Y.: A variant of Jarratt method with sixth-order convergence. Appl. Math. Comput. 204(1), 14–19 (2008)
Wang, X.; Kou, J.; Li, Y.: Modified Jarratt method with sixth-order convergence. Appl. Math. Lett. 22(12), 1798–1802 (2009)
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
On behalf of all authors, Debasis Sharma states that there is no conflict of interest.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made. The images or other third party material in this article are included in the article's Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article's Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder. To view a copy of this licence, visit http://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Argyros, I.K., Sharma, D., Argyros, C.I. et al. Extended three step sixth order Jarratt-like methods under generalized conditions for nonlinear equations. Arab. J. Math. 11, 443–457 (2022). https://doi.org/10.1007/s40065-022-00379-9
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s40065-022-00379-9