
Abstract
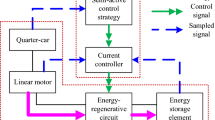
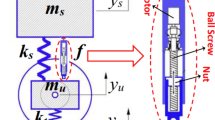
A system of electromagnetic semi-active suspension reclaiming energy (ESASRE), with an novel control varying charge voltage in steps (CVCVIS) based optimal integrated controller, is newly proposed to improve ride comfort and energy reclaiming. The proposed CVCVIS is built by changing the number of battery packs. The dynamic model of the semiactive suspension reclaiming energy is established first, which fully accounts for the non-linear characteristics of the damping actuator reclaiming energy (DARE). The parameters of DARE are decided by a compromise between ride comfort and manufacturing cost, with consideration of installation convenience. A integrated control system for ESASRE includes a controller for calculating the real-time ideal control force based on optimal linear quadratic Gaussian (LQG) control and the other for calculating the number of charging batteries to obtain the real-time actual control force using the proposed quasilinear relation function. Performance comparisons are implemented using three suspension types: ESASRE, the passive suspension, and the ideal active suspension. The performance index of ESASRE is 19.8% lower than that of the passive suspension, and 3.82% higher than that of the active suspension. With ESASRE, the power flowing into the battery pack accounts for 77.72% of the total vibration energy absorbed by DARE.
Similar content being viewed by others

Abbreviations
- a2:
-
acceleration of sprung mass, m/s2
- c b :
-
damping of passive suspension, N·s/m
- c s :
-
structural friction damping of ESASRE, N·s/m
- c vvd :
-
variable viscous damping, N·s/m
- E :
-
eigenvector of system
- e dz−1 :
-
dead zone voltage when ?v equals 1 m/s, V
- e i (i=a, b, c):
-
ith phase back EMF of PMSM, V
- F :
-
actual control force, N
- F ida :
-
ideal active control force, N
- F idsa :
-
ideal semi-active control force, N
- F mn :
-
mean value of F, N
- f0:
-
lower cut off frequency, Hz
- f(θ i ) (i=a, b, c):
-
ith phase position function about the rotor angle displacement, rad
- G q (n 0):
-
road irregularity coefficient, m2/m−1
- i ab , i ca , i bc :
-
a−b, c−a and b−c phases current respectively, A
- i i (i=a, b, c):
-
ith phase current of PMSM, A
- J :
-
suspension quadratic performance index
- k 1 :
-
tire stiffness, N/m
- k 2 :
-
suspension stiffness, N/m
- k F−∆v :
-
the slope of the F relative to ∆v, N/(m/s)
- L :
-
phase self inductance, H
- M :
-
phase mutual inductance, H
- m 1 :
-
unsprung mass, kg
- m 2 :
-
sprung mass, kg
- n 0 :
-
reference spatial frequency, m−1
- P all :
-
all power absorbed by cs and DARE, kW
- P b :
-
power flowing into battery pack, kW
- P ls :
-
power consumed by three phase resistances and c s , kW
- p p :
-
number of paralleled pole pairs of stator phases
- p s :
-
lead of ball screw mechanism, m
- q :
-
displacement input of suspension system, m
- Q i :
-
ith diode in Figure 2
- R :
-
phase resistance, Ω
- S :
-
solution of Ricatti equation
- S i :
-
ith controlled switch in Figure 2
- T :
-
total time of vehicle running, s
- T m :
-
electromagnetic torque of PMSM, N·m
- t :
-
time variable, s
- u :
-
vehicle speed, m/s
- u 0 :
-
voltage of a single battery, V
- u ba :
-
real-time charge voltage, V
- −u os :
-
offset voltage to ceil(·) function, V
- v flr :
-
floor value of ∆v, m/s
- w :
-
road white-noise signal
- x 1 :
-
vertical displacement of unsprung mass, m
- x 2 :
-
vertical displacement of sprung mass, m
- Y :
-
feedback gain matrix of LQG controller
- ∆v :
-
relative speed of ESASRE, m/s
- δ 1, δ;2 :
-
weight of (x 1−q)2 and weight of (x 2−x 1)2
- θ :
-
angular displacement of PMSM, rad
- Φ :
-
flux linkage of PMSM, Wb
- η :
-
number of charge batteries
- a, b, c :
-
three phases of PMSM
References
Aldair, A. A. and Wang, W. J. (2011). A neurofuzzy controller for full vehicle active suspension systems. J. Vibration and Control 18, 12, 1837–1854.
Beno, J., Hoogterp, F. and Bresie, D. (1995). Electromechanical suspension for combat vehicles. SAE Paper No. 950775.
Chen, S. A., Qiu, F., He, R. and Lu, S. L. (2008). A method determining the weights of suspension based on LQG control. J. Vibration and Shock 27, 2, 65–69.
Chen, S. A., He, R., Liu, H. G. and Yao, M. (2012). Probe into necessity of active suspension based on LQG control. Physics Procedia, 25, 932–938.
Huang, K., Yu, F. and Zhang, Y. C. (2011). Active controller design for an electromagnetic energy-regenerative suspension. Int. J. Automotive Technology 12, 6, 877–885.
Huang, K., Zhang, Y. C. and Yu, F. (2012). Predictive controller design for electromagnetic suspension based on mixed logical dynamical model. J. Vibration and Control 18, 8, 1165–1176.
Karnopp, D. (1989). Permanent magnet linear motors used as variable mechanical dampers for vehicle suspensions. Vehicle System Dynamics 18, 4, 187–200.
Kim, N. H. and Ge, L. (2012). Dynamic modeling of electromagnetic suspension system. J. Vibration and Control 19, 5, 729–741.
Lan, B., Yu, F. and Liu, J. J. (2003), The design of LQG controller of active suspension. J. System Simulation 15, 1, 140–153.
Lin, Z. Y. and Su, Z. G. (2008). Probability Theory. Zhejiang University Press. Hangzhou. China.
Liu, W. and Ya, H. (2012). Cooperative optimization of ride comfort and handling stability by integrated control strategy. SAE Int. J. Commercial Vehicles 5, 1, 119–127.
Matlab 7.10.0 (2010). help/ SimPowerSystems/ Blocks/Machines/ Permanent Magnet Synchronous Machines
Nakano, K. and Suda, Y. (2004). Combined type selfpowered active vibration control of truck cabins. Vehicle System Dynamics 41, 6, 449–473.
Okada, Y. and Harada, H. (1995). Active and regenerative control of electro-dynamic vibration damper. Proc. Design Engineering Technical Conf., 595–560.
Okada, Y., Harada, H. and Suzuki, K. (1996). Active and regenerative control of linear DC motor type damper. Proc. 3rd Int. Conf. Motion and Vibration Control, 321–326.
Okada, Y., Harada, H. and Suzuki, K. (1997). Active and regenerative control of an electrodynamic-type suspension. JSME Int. J. 40, 2, 272–278.
Soliman, H. and Bajabaa, N. (2012). Robust guaranteedcost control with regional pole placement of active suspensions. J. Vibration and Control 19, 8, 1170–1186.
Suda, Y. and Shiba, T. (1996). A new hybrid suspension system with active control and energy regeneration. Vehicle System Dynamics 25, S1, 641–654.
Suda, Y., Suematsu, K. and Nakano, K. (2004). Study on electromagnetic damper for automobiles with nonlinear damping force characteristics. Vehicle System Dynamics 41, S, 636–646.
Zhang, L. J. and Zhang, T. X. (2005). Study on general model of random inputs of the vehicle with four wheels correlated in time domain. Trans. Chinese Society for Agricultural Machinery 36, 12, 29–31.
Zhang, Y. C., Yu, F. and Huang, K. (2009). A state of the art review on regenerative vehicle active suspension. Proc. 3rd Int. Conf. Mechanical Engineering and Mechanics, 1689–1695.
Zhang, Y. C., Cao, J. Y. and Yu, F. (2012). Design of active and energy-regenerative controllers for DC-motor-based suspension. Mechatronics 22, 8, 1124–1134.
Zhao, Y., Zhao, L. and Gao, H. (2010). Vibration control of seat suspension using H reliable control. J. Vibration and Control 16, 12, 1859–1879.
Zuo, L. and Zhang, P. S. (2013). Energy harvesting, ride comfort, and road handling of regenerative vehicle suspensions. J. Vibration and Acoustics 135, 1, 1–8.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Chen, S.A., Li, X., Zhao, L.J. et al. Development of a control method for an electromagnetic semi-active suspension reclaiming energy with varying charge voltage in steps. Int.J Automot. Technol. 16, 765–773 (2015). https://doi.org/10.1007/s12239-015-0077-3
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s12239-015-0077-3