
Abstract
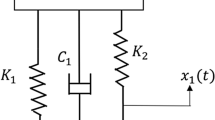
This paper studied the nonlinear vibration and resonance of a Cartesian manipulator system carrying an intermediate end effector under mixed excitations. The multiple scales method is applied to get the approximate solutions of this system of the second-order differential equation. Furthermore, the analytical solution obtained the amplitudes and phases of the response from the first-order differential equation governing. We extracted all worst resonance cases and studied it numerically. The numerical solutions and response amplitude of this system are also studied and discussed. We analyzed the stability of the steady-state solution of a Cartesian manipulator system using frequency response equations and phase plane technique at the worst resonance cases. Comparison between analytical and numerical solutions is obtained. We determined both bifurcation diagrams and stability using Poincaré maps. Also, the numerical results are obtained using MAPLE and MATLAB algorithms.













Similar content being viewed by others

References
Coleman, M.P.: Vibration eigenfrequency analysis of a single-link flexible manipulator. J. Sound Vib. 212, 107–120 (1998)
Coleman, M.P., McSweeney, L.A.: Analysis and computation of the vibration spectrum of the Cartesian flexible manipulator. J. Sound Vib. 274, 445–454 (2004)
Chalhoub, N.G., Foury, G.A.K., Bazzi, B.A.: Design of robust controllers and a nonlinear observer for the control of a single-link flexible robotic manipulator. J. Sound Vib. 291, 437–461 (2006)
Dwivedy, S.K., Eberdhard, P.: Dynamic analysis of flexible manipulators, a literature review. Mech. Mach. Theory 41, 749–777 (2006)
Dixit, U.S., Kumar, R., Dwivedy, S.K.: Shape optimization of flexible robotic manipulators. J. Mech. Des. 128, 559–565 (2006)
Hassanpour, P.A., Esmailzadeh, E., Cleghorn, W.L., Mills, J.K.: Generalized orthogonality condition for beams with intermediate lumped masses subjected to axial force. J. Vib. Control 16, 665–683 (2010)
Pratiher, B., Dwivedy, S.K.: Non-linear dynamics of a flexible single link Cartesian manipulator. Int. J. Non-Linear Mech. 42, 1062–1073 (2007)
Pratiher, B., Dwivedy, S.K.: Non-linear dynamics of a soft magneto-elastic Cartesian manipulator. Int. J. Non-Linear Mech. 44, 757–768 (2009)
Pratiher, B., Dwivedy, S.K.: Nonlinear response of a flexible Cartesian manipulator with payload and pulsating axial force. Nonlinear Dyn. 57, 177–195 (2009)
Pratiher, B., Bhowmick, S.: Nonlinear dynamic analysis of a Cartesian manipulator carrying an end effector placed at an intermediate position. Nonlinear Dyn. 69, 539–553 (2012)
Qiu, Z.: Adaptive nonlinear vibration control of a Cartesian flexible manipulator driven by a ballscrew mechanism. Mech. Syst. Signal Process. 30, 248–266 (2012)
Rahimi, H.N., Nazemizadeh, M.: Dynamic analysis and intelligent control techniques for flexible manipulators: a review. Adv. Robot. 28, 63–76 (2014)
Liu, Y., Li, W., Yang, X., Fan, M., Wang, Y., Lu, E.: Vibration response and power flow characteristics of a flexible manipulator with a moving base. Shock Vib. 2015 Article ID 589507 (2015) 1–8
Liu, Y., Li, W., Yang, X., Wang, Y.: Effect of motion disturbances on the vibration responses of a flexible manipulator. In: The 14th IFToMM World Congress, Taipei, Taiwan October, 25–30 (2015)
Kamel, M.M., Hamed, Y.S.: Non-linear analysis of an inclined cable under harmonic excitation. Acta Mech. 214(3–4), 315–325 (2010)
El-Ganaini, W.A.A., Kamel, M.M., Hamed, Y.S.: Vibration reduction in ultrasonic machine to external and tuned excitation forces. Appl. Math. Model. 33, 2853–2863 (2009)
Kamel, M.M., El-Ganaini, W.A.A., Hamed, Y.S.: Vibration suppression in ultrasonic machining described by non-linear differential equations. J. Mech. Sci. Technol. 23(8), 2038–2050 (2009)
Kamel, M.M., El-Ganaini, W.A.A., Hamed, Y.S.: Vibration suppression in multi-tool ultrasonic machining to multi-external and parametric excitations. Acta. Mech. Sin. 25, 403–415 (2009)
Hamed, Y.S., Sayed, M., Cao, D.-X., Zhang, W.: Nonlinear study of the dynamic behavior of a string-beam coupled system under combined excitations. Acta. Mech. Sin. 27(6), 1034–1051 (2011)
Sayed, M., Hamed, Y.S.: Stability and response of a nonlinear coupled pitch-roll ship model under parametric and harmonic excitations. Nonlinear Dyn. 64, 207–220 (2011)
Hamed, Y.S., Amer, Y.A.: Nonlinear saturation controller for vibration supersession of a nonlinear composite beam. J. Mech. Sci. Technol. 28(8), 2987–3002 (2014)
Hamed, Y.S.: Nonlinear oscillations and chaotic dynamics of a supported FGM rectangular plate system under mixed excitations. J. VibroEng. 16(7), 3218–3235 (2014)
Hamed, Y.S., Sayed, M.: Stability analysis and response of nonlinear rotor-seal system. J. VibroEng. 16(8), 4152–4170 (2014)
Hamed, Y.S., EL-Sayed, A.T., El-Zahar, E.R.: On controlling the vibrations and energy transfer in MEMS gyroscopes system with simultaneous resonance. Nonlinear Dyn. 83(3), 1687–1704 (2016)
Cartmell, M.P.: Introduction to Linear, Parametric and Nonlinear Vibrations. Chapman & Hall, London (1990)
Nayfeh, A.H., Balachandran, B.: Applied Nonlinear Dynamics: Analytical: Computational and Experimental Methods. Wiley, New York (1995)
Poincaré, H.: Les Methodes Nouvelles de la Méchanique Céleste. Gauthier-Villars, Paris (1899)
Just, W., Kantz, H.: Some considerations on Poincaré maps for chaotic flows. J. Phys. A Math. Gen. 33, 163–170 (2000)
Tucker, Warwick: Computing accurate Poincaré maps. Physica D 171, 127–137 (2002)
Nayfeh, A.H.: Problems in Perturbation. Wiley, New York (1985)
Nayfeh, A.H., Mook, D.T.: Nonlinear Oscillations. Wiley, New York (1995)
Acknowledgements
The authors thank the anonymous reviewers for their useful comments that improved the quality of the paper.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Hamed, Y.S., Alharthi, M.R. & AlKhathami, H.K. Nonlinear vibration behavior and resonance of a Cartesian manipulator system carrying an intermediate end effector. Nonlinear Dyn 91, 1429–1442 (2018). https://doi.org/10.1007/s11071-017-3955-6
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11071-017-3955-6