
Abstract
The paper presents a novel 3-dimensional shape-based algorithm which extends the domain of analytical solutions to planeto-centric mission scenarios, which classically entail even thousands revolutions to transfer to the final orbit. Thanks to the strong physical meaning the proposed method keeps while shaping the trajectory, the method succeeds in outputting a solution close to the real optimum. The proposed approach allows to easily formalize practical mission constraints, such as maximum thrust threshold and eclipses; free and fixed time of flight is manageable as well. The approach is almost completely analytic, which is beneficial as it significantly decreases the computational load. It is well suited for complex mission scenarios and for fast detection near optimal solutions to support the whole mission design.










Similar content being viewed by others
Abbreviations
- a :
-
Semi-major axis
- \(a_{\mathrm{pert}}\) :
-
Perturbation acceleration
- \(a_\mathrm{s}\) :
-
Semi-major axis
- \(A_{\mathrm{sa}}\) :
-
Solar panel surface
- e :
-
Eccentricity
- f :
-
Second MEE
- \(G_{\mathrm{loss}}\) :
-
Gravity loss
- g :
-
Third MEE
- h :
-
Fourth MEE
- \(I_\mathrm{s}\) :
-
Specific impulse
- i :
-
Inclination
- k :
-
Fifth MEE
- KP:
-
Keplerian elements
- L :
-
Sixth MEE
- m :
-
Mass
- \(N_{\mathrm{rev}}\) :
-
Number of revolutions
- \(P_{\mathrm{SS}}\) :
-
Spacecraft power consumption
- p :
-
First MEE
- r :
-
In-plane attractor distance
- s :
-
Attractor distance
- T :
-
Thrust
- \(T_{\mathrm{IN}}\) :
-
In-plane thrust
- \(T_{\mathrm{OUT}}\) :
-
Out-of-plane thrust
- t :
-
Time
- \(v_\mathrm{r}\) :
-
Radial velocity
- \(v_z\) :
-
Normal velocity
- \(v_{\theta }\) :
-
Transversal velocity
- x :
-
Non-dimensional anomaly
- z :
-
Out-of-plane displacement
- \(\alpha \) :
-
In-plane thrust angle
- \(\beta \) :
-
Out-of-plane thrust angle
- \(\gamma \) :
-
Flight path angle
- \(\delta \) :
-
Declination
- \(\varDelta _\mathrm{L}\) :
-
Variation in true longitude
- \(\eta _{\mathrm{tot}}\) :
-
Power production efficiency
- \(\theta \) :
-
Anomaly
- \(\phi \) :
-
Solar aspect angle
- \(\chi \) :
-
Interpolating function
- \(\psi \) :
-
Total transfer angle
- \(\omega \) :
-
Angular velocity
References
Abdelkhalik, O., Taheri, E.: Shape based approximation of constrained low-thrust space trajectories using Fourier series. J. Spacecr. Rockets 49, 535–546 (2012)
Abdelkhalik, O., Taheri, E.: Approximate on-off low-thrust space trajectories using Fourier series. J. Spacecr. Rockets 49, 962–965 (2012)
Arianespace, VEGA user’s Manual (2014)
Battin, R.H.: An Introduction to the Mathematics and Methods of Astrodynamics, chapter 1. AIAA education Series, Reston (1999)
Cefola, P.J.: Equinoctial Orbital Elements—Application To Artificial Satellite Orbits. In: AIAA/AAS Astrodynamics Specialist Conference and Exhibit, Palo Alto, California (1972)
Chobotov, V.A.: Orbital Mechanics. AIAA Education Series, Reston (2002)
Conway, B.A.: Spacecraft Trajectory Optimization, pp. 37–76. Cambridge University Press, Cambridge (2010)
Curtis, H.: Orbital Mechanics for Engineering Students. Elsevier, Oxford (2005)
De Pascale, P., Vasile, M.: Preliminary design of low-thrust multiple gravity-assist trajectories. J. Spacecr. Rockets 43, 1065–1076 (2006)
European Space Agency, ESA Space Debris Mitigation Compliance Verification Guidelines (2015)
Gondelach, D.J., Noomen, R.: Hodographic-shaping method for low-thrust interplanetary trajectory design. J. Spacecr. Rockets 52, 728–738 (2015)
Graham, K.F., Rao, A.V.: Minimum-time trajectory optimization of multiple revolution low-thrust earth-orbit transfers. J. Spacecr. Rockets 52, (2015)
Kluever, C., Oleson, R.: Direct approach for computing near-optimal low-thrust earth-orbit transfers. J. Spacecr. Rockets 35, 509–515 (1998)
Larson, W.J., Wertz, J.R.: Space Mission Analysis and Design, pp. 407–427. Kluver Academy Publisher, London (1999)
Nocedal, J., Wright, S.J.: Numerical Optimization. Springer, New York (2006)
Novak, D.M., Vasile, M.: Improved shaping approach to the preliminary design of low-thrust trajectories. J. Guid. Control Dyn. 34, 128–147 (2011)
Petropoulos, A.E., Sims, John A.: A Review of Some Exact Solutions to the Planar Equations of Motion of a Thrusting Spacecraft. In: Proceedings of the 2nd International Symposium on Low Thrust Trajectories, Toulouse, France, 18 June (2002)
Petropoulos, A.E., Longuski, J.M.: Shape-based algorithm for automated design of low-thrust, gravity-assist trajectories. J. Spacecr. Rockets 41, 787–796 (2004)
Prinetto, J., Lavagna, M.: Main Belt Active Asteroids Samples Collection And Return Mission Design. In: Italian Association of Aeronautics and Astronautics XXIV International Conference, AIDAA, Palermo-Enna, Italy, 18–22 September (2017)
Sreesawet, S., Dutta, A.: Fast and robust computation of low-thrust orbit-raising trajectories. J. Guid. Control Dyn. 41, 1888–1905 (2018)
Sutton, G.P., Biblaz, O.: Rocket Propulsion Elements, pp. 622–672. Wiley, Hoboken (2010)
Taheri, E., Kolmanovsky, I., Atkins, E.: Shaping low-thrust trajectories with thrust-handling feature. Adv. Space Res. 879–890, (2017)
Taheri, E., Abdelkhalik, O.: Initial three-dimensional low-thrust trajectory design. Adv. Space Res. 57, 889–903 (2016)
Topputo, F., Zhang, C.: Survey of direct transcription for low-thrust space trajectory optimization with applications. Abst. Appl. Anal. 2014, 15 (2014)
Tsien, H.S.: Take-off from satellite orbit. J. Am. Rocket Soc. 23, 233–236 (1953)
Wall, B.J.: Shape-Based Approximation Method for Low-Thrust Trajectory Optimization. In: AIAA/AAS Astrodynamics Specialist Conference and Exhibit, AIAA. Honolulu, Hawaii (2008)
Wall, B.J., Conway, B.A.: Shape-based approach to low-thrust rendezvous trajectory design. J. Guid. Control Dyn. 32, 95–101 (2009)
Xie, C., Zhang, G., Zhang, Y.: Shaping approximation for low-thrust trajectories with large out-of-plane motion. J. Guid. Control Dyn. 39, 2776–2785 (2016)
Zeng, K., Geng, Y., Wu, B.: Shape-based analytic safe trajectory design for spacecraft equipped with low-thrust engines. Aerosp. Sci. Technol. 62, 87–97 (2017)
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
Authors declare that no conflict of interest holds.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
A List of derivatives
A List of derivatives
Appendix reports the equations fundamental to the geometrical interpolation of the trajectory. The subscript ’1’ indicates the departure orbit, while the subscript ’2’ indicates the arrival orbit.
1.1 A.1 Departure orbit
The inclination of the initial orbit with respect to the reference plane can be computed as in Eq. 39.
The declination (\(\delta (x)_1\)) of the initial orbit over the reference plane can be computed using Eq. 40, while its derivatives can be computed using Eqs. 41, 42 and 43:
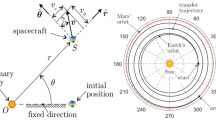
In the previous equations, another spherical angle (\(\beta (x)_1\) in Fig. 2) is introduced together with its derivatives. They can be computed using Eq. 44:
\(\varDelta L_1(x)\) is fundamental to compute the Longitude (6th MEE) on the initial orbit at each x and, as a consequence, the attractor distance from the attractor on the departure orbit as function of x; it can be computed with Eqs. 45 and 46:
1.2 A.2 Target orbit
The inclination of the arrival orbit with respect to the reference plane can be computed as in Eq. 47:
The declination (\(\delta (x)_2\)) of the arrival orbit over the reference plane can be computed using Eq. 48, while its derivatives can be computed using Eqs. 49, 50 and 51:
In the previous equations, another spherical angle (\(\beta (x)_2\) in Fig. 2) is introduced together with its derivatives. They can be computed using Eq. 52:
The angle \(\varDelta L_2(x)\) is fundamental to compute the Longitude (6th MEE) on the arrival orbit at each x and so the attractor distance of the arrival orbit as function of x; it can be computed with Eqs. 53 and 54:
1.3 A.3 Attractor distances
To compute the attractor distance, the longitude at each position x on the initial and final orbits using Eqs. 55 and 56 has to be computed first:
The attractor distance on the initial and final orbits can be computed using Eq. 57:
The q term appears with its derivatives; it can be computed using Eq. 58:
Rights and permissions
About this article

Cite this article
Prinetto, J., Lavagna, M. Elliptical shape-based model for multi-revolution planeto-centric mission scenarios. Celest Mech Dyn Astr 133, 3 (2021). https://doi.org/10.1007/s10569-020-10001-9
Received:
Revised:
Accepted:
Published:
DOI: https://doi.org/10.1007/s10569-020-10001-9