
Abstract
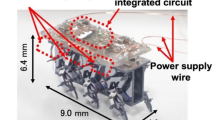
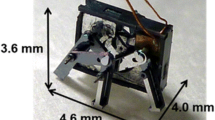
This paper discussed insect-type MEMS microrobot system which could locomote without using computer programs. Locomotion of the MEMS microrobot was generated using the analog circuit of artificial neural networks. We constructed the artificial neural networks as a bare chip integrated circuit (IC) which could mount on top of the MEMS microrobot. As a result, the MEMS microrobot system could perform the locomotion using constructed bare chip IC of artificial neural networks. The insect-type MEMS microrobot system was 0.079 g in weight and less than 5.0 mm in size. Only the power source was outside of the robot. In addition, we analyze the heat conduction of the shape memory alloy-type actuator. It was shown that the heat of shape memory alloy conducts to the mechanical parts of the MEMS microrobot; therefore, locomotion becomes slowly after 30 s. The slow locomotion was 2 mm/min. We constructed the less conduction shape memory alloy-type actuator. The locomotion speed of the insect-type MEMS microrobot using less conduction shape memory alloy-type actuator was 90.8 mm/min.











Similar content being viewed by others

References
Shibata T, Aoki Y, Otsuka M, Idogaki T, Hattori T (1997) Microwave energy transmission system for microrobot. IEICE Trans Electron E80-C(2):303–308
Takeda M (2001) Applications of MEMS to industrial inspection. In: IEEE MEMS, pp 182–191
Habib MK, Watanabe K, Izumi K (2007) Biomimetics robots: from bio-inspiration to implementation. In: Proceedings of the 33rd annual conference of the IEEE Industrial Electronics Society, pp 143–148
Habib MK (2011) Biomimetcs: innovations and robotics. Int J Mechatron Manuf Syst 4(2):113–134
Baisch AT, Sreetharan PS, Wood RJ (2010) Biologically-inspired locomotion of a 2g hexapod robot. Proc IEEE IROS 2010:5360–5365
Tsuruta K, Mikuriya Y, Ishikawa Y (1999) Micro sensor developments in Japan. Sens Rev 19:37–42
Donald BR, Levey CG, McGray CD, Paprotny I, Rus D (2006) An untethered, electrostatic, globally controllable MEMS micro-robot. J Microelectromech Syst 15:1–15
Edqvist E, Snis N, Mohr RC, Scholz O, Corradi P, Gao J, Johansson S (2009) Evaluation of building technology for mass producible millimeter-sized robots using flexible printed circuit boards. J Micromech Microeng 19(7):1–11
Tang WC, Nguyen TH, Howe RT (1989), Laterally driven poly silicon resonant microstructure. In: Proceedings of IEEE micro electro mechanical systems. An investigation of micro structures, sensors, actuators, machines and robots, pp 53–59
Sniegowski JJ, Garcia EJ (1996) Surface-micromachined gear trains driven by an on-chip electrostatic microengine. IEEE Electron Device Lett 17:366–368
Asada N, Matsuki H, Minami K, Esashi M (1994) Silicone micromachined two-dimensional galvano optical scanner. IEEE Trans Magn 30:4647–4649
Suzuki Y, Tani K, Sakuhara T (2000) Development of a new type piezoelectric micromotor. Proc Sens Actuators A: Phys 83:244–248
Surbled P, Clerc C, Pioufle BL, Ataka M, Fujita H (2001) Effect of the composition and thermal annealing on the transformation temperature sputtered TiNi shape memory alloy thin films. Thin Solid Films 401:52–59
Matsuoka K (1987) Mechanism of frequency and pattern control in the neural rhythm generators. Biol Cybern 56:345–353
Ikemoto T, Nagashino H, Kinouchi Y Yoshinaga T (1997) Transitions in a four coupled neural oscillator model. In: International symposium on nonlinear theory and its applications, pp 561–564
Nakada K, Asai T, Amemiya Y (2003) An analog CMOS central pattern generator for interlimb coordination in quadruped locomotion. IEEE Trans Neural Netw 14:1356–1365
Okazaki K, Ogiwara T, Yang D, Sakata K, Saito K, Sekine Y, Uchikoba F (2011) Development of pulse control type MEMS micro robot with hardware neural network. Artif Life Robot 16(2):229–233
Saito K, Takato M, Sekine Y, Uchikoba F (2012) Biomimetics micro robot with active hardware neural networks locomotion control and insect-like switching behaviour. Int J Adv Robot Syst In Tech 9(226):1–6
Maezumi K, Yamasaki S, Obara H, Naito Y, Iwata K, Tatani M, Okane Y, Ishihara Y, Hidaka T, Asano Y, Oku H, Takato M, Saito K, Uchikoba F (2014) Hexapod-type SMA driven MEMS microrobot with mounted bare chip artificial neural networks IC. In: Proceedings of the nineteenth international symposium on artificial life and robotics 2014, pp 401–405
Bhardwaj JK, Ashraf H (1995) Advanced silicon etching using high-density plasmas. In: Proceedings of SPIE micromachining and micro fabrication process technology, vol 2639, pp 224–233
Homma D (2003) Metal artificial muscle bio metal fiber. RSJ 21:22–24
Toki Corporation’s Homepage. http://www.toki.co.jp. Accessed 24 Dec 2015
Acknowledgments
This study was supported by Nihon University College of Science and Technology Project Research, Nihon University Academic Research Grant (Total research, “14-002”) and JSPS KAKENHI Grants 25420226. We appreciate the support. Specimen fabrication was supported by the Research Center for Micro Functional Devices of Nihon University. The VLSI chip in this study has been fabricated by Digian Technology, Inc. This work is supported by VLSI Design and Education Center (VDEC), the University of Tokyo in collaboration with Synopsys, Inc., Cadence Design Systems, Inc. and Mentor Graphics, Inc.
Author information
Authors and Affiliations
Corresponding author
About this article

Cite this article
Saito, K., Sugita, K., Ishihara, Y. et al. Insect-type MEMS microrobot with mountable bare chip IC of artificial neural networks. Artif Life Robotics 22, 118–124 (2017). https://doi.org/10.1007/s10015-016-0324-3
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10015-016-0324-3