
Abstract
We study the Ordered Covering (OC) problem. The input is a finite set of n elements X, a color function \(c:X \rightarrow \{0,1\}\) and a collection \(\mathcal {S}\) of subsets of X. A solution consists of an ordered tuple \(T=(S_1,\dots ,S_{\ell })\) of sets from \(\mathcal {S}\) which covers X, and a coloring \(g:\{S_i\}_{i=1}^\ell \rightarrow \{0,1\}\) such that \(\forall x \in X\), the first set covering x in the tuple, namely \(S_j\) with \(j=\min \{i : x \in S_i\}\), has color \(g(S_j)=c(x)\). The minimization version is to find a solution using the minimum number of sets. Variants of OC include OC\((\alpha _0,\alpha _1)\) in which each element of color \(i \in \{0,1\}\) appears in at most \(\alpha _i\) sets of \(\mathcal {S}\), and k–OC in which the first set of the solution \(S_1\) is required to have color 0, and there are at most \(k-1\) alternations of colors in the solution. Among other results we show:
-
There is a polynomial time approximation algorithm for Min–OC(2, 2) with approximation ratio 2. (This is best possible unless Vertex Cover can be approximated within a ratio better than 2.) Moreover, Min–OC(2, 2) can be solved optimally in polynomial time if the underlying instance is bipartite.
-
For every \(\alpha _0, \alpha _1 \ge 2\), there is a polynomial time approximation algorithm for Min–3–OC\((\alpha _0,\alpha _1)\) with approximation \(\alpha _1(\alpha _0 - 1)\). Unless the unique games conjecture is false, this is best possible.

Similar content being viewed by others

References
Arora, S., Lund, C.: Hardness of Approximation. In: Hochbaum, D.S. (ed.) Approximation Algorithms for NP-Hard Problems. PWS Publishing Company, Boston (1997)
Arora, S., Babai, L., Stern, J., Sweedyk, E.: The hardness of approximate optima in lattices, codes, and systems of linear equations. J. Comput. Syst. Sci. 54(2), 317–331 (1997)
Bhaskara, A., Charikar, M., Chlamtac, E., Feige, U., Vijayaraghavan, A.: Detecting high log-densities: an \(\mathit{O}(\mathit{n}^{\text{1/4}}\)) approximation for densest k-subgraph. In: STOC, pp. 201–210 (2010)
Dinur, I., Safra, S.: On the hardness of approximating minimum vertex cover. Ann. Math. 162(1), 439–485 (2005)
Dinur, I., Steurer, D.: Analytical approach to parallel repetition. In: STOC 2014, pp. 624–633 (2014)
Dinur, I., Guruswami, V., Khot, S., Regev, O.: A new multilayered PCP and the hardness of hypergraph vertex cover. SIAM J. Comput. 34(5), 1129–1146 (2005)
Feige, U.: A threshold of ln n for approximating set cover. J. ACM 45(4), 634–652 (1998)
Feige, U., Feige, U.: Relations between average case complexity and approximation complexity. In: STOC 2002, pp. 534–543 (2002)
Halperin, E.: Improved approximation algorithms for the vertex cover problem in graphs and hypergraphs. SIAM J. Comput. 31(5), 1608–1623 (2002)
Hancock, T.R., Jiang, T., Li, M., Tromp, J.: Lower bounds on learning decision lists and trees. Inf. Comput. 126(2), 114–122 (1996)
Impagliazzo, R., Paturi, R., Zane, F.: Which problems have strongly exponential complexity? J. Comput. Syst. Sci. 63(4), 512–530 (2001)
Johnson, D.S.: Approximation algorithms for combinatorial problems. J. Comput. Syst. Sci. 9, 256–278 (1974)
Johnson, D.S., Szegedy, M.: What are the least tractable instances of max independent set? In: SODA 1999, pp. 927–928 (1999)
Karakostas, G.: A better approximation ratio for the vertex cover problem. ACM Trans. Algorithms 5(4), 41 (2009). doi:10.1145/1597036.1597045
Khot, S.: On the power of unique 2-prover 1-round games. In: Proceedings of 34th ACM Symposium on Theory of Computing, pp. 767–775 (2002)
Khot, S.: Ruling out PTAS for graph min-bisection, dense k-subgraph, and bipartite clique. SIAM J. Comput. 36, 1025–1071 (2006)
Khot, S., Regev, O.: Vertex cover might be hard to approximate to within 2-epsilon. J. Comput. Syst. Sci. 74(3), 335–349 (2008)
Kortsarz, G.: On the hardness of approximating spanners. Algorithmica 30(3), 432–450 (2001)
Lovász, L.: Coverings and colorings of hypergraphs. In: Proceedings of the 4th Southeastern Conference on Combinatorics, Utilitas Mathematica, pp. 3–12 (1973)
Lovász, L.: On the ratio of optimal integral and fractional covers. Discrete Math. 13, 383–390 (1975)
Manurangsi, P.: Almost-polynomial ratio ETH-hardness of approximating densest \(k\)-subgraph. In: STOC 2017, pp. 954–961 (2017)
Moshkovitz, D., Raz, R.: Two query PCP with sub-constant error. In: FOCS 2008, pp. 314–323 (2008)
Acknowledgements
We wish thank Paz Carmi and Yael Stein for introducing to us problems which inspired this work. Special thanks to Yuri Rapoport for referring us to previous work on a variation of the OC problem and k decision lists. This work was supported in part by the Israel Science Foundation (Grant No. 621/12) and by the I-CORE Program of the Planning and Budgeting Committee and the Israel Science Foundation (Grant No. 4/11).
Author information
Authors and Affiliations
Corresponding author
Appendices
Appendix A: Hardness of Approximating Min–OC
Theorem 11
For any \(0< \delta < 1\), Min–OC cannot be approximated by a factor of \(2^{\log ^{\delta } n}\), unless \(NP \subseteq \textit{DTIME}(n^{polylog(n)})\). Moreover, for some q, it is hard to distinguish between instances of OC with a solution of size q with 3 alternations between different colors (namely, 4 layers), and instances in which every solution (with unlimited number of alternations) uses at least \(q \cdot 2^{\log ^{\delta } n}\) sets.
Here we prove Theorem 11. We do so by a reduction from the Min Rep problem, which is a variation of Label Cover.
1.1 A. 1 The Min Rep Problem
The Min Rep problem (see [18]), can be viewed as a minimization version of Label Cover. The input is a bipartite graph \(G = (A,B,E)\), \(|A|=|B|=n\), and partitions \(A_1,\dots ,A_l\) of A and \(B_1,\dots ,B_l\) of B into l clusters of size n / l. The “superedges” between clusters are defined as \(H=\{(A_i,B_j): \exists (a,b)\in E \text { s.t }a \in A_i, b \in B_j\}\). We say \((a,b)\in E\) covers the superedge \((A_i,B_j)\) if \(a \in A_i\) and \(b \in B_j\). The goal is to choose \(A^\prime \subseteq A\) and \(B^\prime \subseteq B\) such that the pairs \(\{(a, b) \in E : a \in A^\prime ,b \in B^\prime \}\) cover all the superedges of H while minimizing \(|A^\prime |+|B^\prime |\).
Via a standard reduction (can be found in [18]), a \(\rho \) approximation ratio for Min Rep is translated to \(8 \rho ^2\) approximation ratio for Label Cover. This implies that if Label Cover is hard to approximate better than \(\rho \), Min Rep is hard to approximate within a factor better than \(\frac{1}{2\sqrt{2}}\sqrt{\rho }\).
Thus, we can deduce hardness results for Min Rep from hardness results for Label Cover. For example, unless \(NP \subseteq \textit{DTIME}(n^{polylog(n)})\) Label Cover has no approximation algorithm achieving a ratio better than \(2^{\log ^{\delta } n}\), for any \(0< \delta < 1\) [1, 2]. Under the weaker assumption that \(P \ne NP\) Label Cover is hard to approximate better than \(\ln ^t n\) for any constant t [22]. The same hardness results also holds for Min Rep.
Lemma 31
If Min Rep is hard to approximate within a factor f(n), it is hard to approximate Min–OC within a factor better than \(O(f(N^{\frac{1}{2}}))\), where n is the number vertices in the Min Rep instance and N is the number of elements in the input to Min–OC.
Moreover, it is hard to distinguish between instances of OC with a solution of size q with 3 alternations between different colors (namely, 4 layers), and instances in which every solution (with unlimited number of alternations) uses at least \(q \cdot f(N^{\frac{1}{2}})\) sets.
Proof of Theorem 11
Unless \(NP \subseteq \textit{DTIME}(n^{polylog(n)})\) Label Cover has no approximation algorithm achieving a ratio better than \(2^{\log ^{\delta } n}\), for any \(0< \delta < 1\) [1, 2]. As discussed in 1.1 the same hardness results apply also for Min Rep. By Lemma 31 under the same assumption, for any \(\delta ^\prime >0\) Min–OC is hard to approximate by a factor better than \(O(2^{\log ^{\delta ^\prime } N^{\frac{1}{2}}})\). Given \(\delta <1\), for a big enough \(\delta ^\prime \) we achieve the required \(2^{\log ^{\delta } N}\) ratio also for Min–OC. \(\square \)
Proof of Lemma 31
Given an input G(A, B, E), \(\{A_i\}_{i=1}^{l}\), \(\{B_j\}_{j=1}^{l}\), H, with parameters \(|A|=|B|=n\), \(|E|=m\), \(|H|=h\) to Min Rep construct an instance of OC with parameters \(|X|=|\mathcal {S}|=2+ 2\cdot \frac{n^2}{h}+m\).
-
The Elements: Define all superedges in H, and all edges in E to be elements with color 1. For every vertex \(v \in A \cup B\), add k elements \(v_1,\dots ,v_k\) of color 0 (k is a parameter to be determined later) denote the set of these elements by V. In addition we introduce two new elements, \(x_0\) of color 0, and \(x_1\) of color 1.
-
The Sets: Add a singleton \(\{v_i\}\) for every \(v_i \in V\). For each \((a,b) \in E\) introduce a set \(S_{(a,b)}=\{a_1,\dots ,a_k, b_1,\dots ,b_k, (a,b), (A_i,B_j) : a \in A_i, b \in B_j\}\). Define a set \(S_0= H \cup V \cup \{x_0\}\) and a set \(S_1= E\cup \{x_1\}\cup \{x_0\}\).
See Fig. 2 for an illustration of the construction.

The elements colors in the figure are black for elements colored 1, and white for color 0. For each copy of a vertex, add a singleton illustrated as \(\{b_{n,1}\}\). For each edge add a set containing the edge, corresponding vertices and superedge, illustrated as \(S_{(a_i,b_j)}\). The set \(S_1\) covers \(x_0\), \(x_1\) and all elements of E. \(S_0\) contain \(x_1\) and all elements of H and V
Observe that the instance we created is feasible. Taking all the singletons with color 0, then all sets of the form \(S_e\) with color 1 and at the end \(S_0\) with color 0 and \(S_1\) with color 1 defines a legal solution.
Claim 32
If the Min Rep instance G has a solution of size q, the OC instance \((X,\mathcal {S},c)\) has a solution of size \(2+h+k \cdot q\).
Proof
Let \(A^\prime , B^\prime \) be a solution of size q for G. Build a solution T, g as follows. First add all sets \(\{v_i\}\), s.t \(v \in A^\prime \cup B^\prime \), \(i=1,\dots ,k\) at the beginning of T with color \(g(\{v_i\})=0\) (\(k \cdot q\) sets). Next we add all sets \(S_{(a,b)}\) which correspond to edges between \(A^\prime \) and \(B^\prime \) with color \(g(S_{(a,b)})=1\). If there is more than one edge (a, b) covering the same superedge, pick only one set \(S_{(a,b)}\) arbitrarily (h sets). At the end of the tuple add \(S_0\) and \(S_1\). Since \(A^\prime ,B^\prime \) covers all superedges, all elements of H are covered by the sets \(S_{(a,b)}\). One can check that all other elements are also covered with the right color. \(\square \)
Claim 33
If every solution for the Min Rep instance G contains at least \(\rho \cdot q\) vertices, every solution to the OC instance \((X,\mathcal {S},c)\) is of size at least \(2+h+k \cdot \rho \cdot q\).
Proof
Let T, g be a solution for \((X,\mathcal {S},c)\). Observe that \(x_1\) is included only in \(S_1\), and \(x_0\) is included only in the sets \(S_0\) and \(S_1\). Therefore T must include \(S_0\) with color 0 before \(S_1\) with color 1. In order to cover the elements of H, we need to use sets of the form \(S_e\). The vertices touching these edges form a solution to the Min Rep instance and therefore the sets \(S_e\) covering H contain at least \(\rho \cdot q \cdot k\) elements from V denote them by \(V^\prime \). Each element \(x_e\) appears only in the sets \(S_1\) and \(S_e\), hence a set \(S_e\) can appear before \(S_1\) only with color 1, meaning that the elements \(V^\prime \) must be covered at the beginning of the tuple by singletons.
In total, every solution contain at least \(2+h+\rho \cdot q \cdot k\) sets. \(\square \)
Analysis of Parameters: Assuming it is hard to distinguish between instances of Min Rep with a solution of size q and instances where every solution is of size at least \(\rho (n) \cdot q\), it is hard to distinguish between instances of Min–OC with solution of size \(2+h+k \cdot q\) and instances in which every solution is of size at least \(2+h+k \cdot \rho (n) \cdot q\). Note that \(q \le 2n\) and \(h \le q^2\). Choosing \(k=\frac{h}{q}\) we get an inapproximability result of \(\Omega (\rho (n))\), for instances of size \(N=2+2 \cdot \frac{h}{q} \cdot n+ m=O(n^2)\). Hence if the Min Rep problem is hard to approximate within a factor of f(n), Min–OC is hard to approximate better than \(f(O(\sqrt{N}))\). Since f is sublinear (or in the worse case linear), Min–OC is hard to approximate better than \(O(f(\sqrt{N}))\). \(\square \)
Appendix B: Exact Algorithms
The Exponential Time Hypothesis (ETH) introduced in [11] states that 3SAT has no \(2^{o(n)}\) time algorithm. Vertex Cover has no algorithm in time \(O^*(2^{o(n+m)})\), where n is the number of vertices and m is the number of edges [11, 13]. As shown in Observation 1.2.1, Vertex Cover is a special case of all variations of OC and therefore this bounds holds for these problems as well. Regarding exact algorithms for Min–OC the following holds.
Theorem 12
For an instance with n elements and m sets, the Min–OC problem can be solved in \(O^*(2^{\min (n,m)})\) time, where \(O^{*}\) notation hides a polynomial factor in n and m. Assuming the Exponential Time Hypothesis, Min–OC cannot be solved in time \(O^*(2^{o(\min (n,m))})\).
Moreover, for all k the same result also applies for Min–k–OC.
In order to prove Theorem 12, we give two algorithms for Min–OC and Min–k–OC, one with time complexity of \(O^*(2^m)\) and the other with time complexity \(O^*(2^n)\). The \(O^{*}\) notation hides a polynomial factor in n and m.
1.1 B.1 \(O^*(2^m)\) Algorithm
As stated in Sect. 1.2.2, given an instance of OC, constructing a solution if one exists can be done in polynomial time. Denote the polynomial time procedure computing this task on elements Y, sets \(\mathcal {T}\) and cost function c by \(P(X,\mathcal {T},c)\). Given an input \((X,\mathcal {S},c)\), with parameters \(|\mathcal {S}|=m\), and \(|X|=n\), consider the following algorithm for Min–OC.
-
Starting from \(i=1\) to m, for each subset \(\mathcal {T} \subseteq \mathcal {S}\) of size \(|\mathcal {T}|=i\), invoke \(P(X,\mathcal {T},c)\).
-
If P returns a solution \(\rightarrow \) return it and halt.
-
If P returns false \(\rightarrow \) continue to the next subset.
-
If P failed on all subsets of \(\mathcal {S}\), the input is not feasible \(\rightarrow \) return false.
For every \(\mathcal {T} \subseteq \mathcal {S}\) which contains the sets of a solution tuple, the procedure \(P(X,\mathcal {T},c)\) return a solution. Hence if the input is feasible, the algorithm constructs a solution of minimal size.
Regarding the running time, denote the running time of the procedure P by T(n, m). The running time of the algorithm is bounded by:
Extension for Min–k–OC: For any k, by replacing P with the polynomial time procedure which decides feasibility of k–OC introduced in Sect. 1.2.2, we obtain an algorithm for Min-k–OC with the same time complexity.
1.2 B.2 \(O^*(2^n)\) Algorithm
We introduce an algorithm based on dynamic programming, first for Min–OC, and then for Min–k–OC.
Let \((X,\mathcal {S},c)\) be an input to OC with parameters \(|X|=n\) and \(|\mathcal {S}|=m\). For each subset \(Y \subseteq X\), define f(Y) to be the size of a minimal solution for \((Y, \mathcal {S}|_Y,c)\), where \(\mathcal {S}|_Y=\{S\cap Y : S \in \mathcal {S}\}\). We build a table T computing f inductively in the following way:
-
\(T(\emptyset )=0\)
-
\(\forall Y \subseteq X\), \(T(Y)=\min \{T(Y \setminus S_j)+1 : S_j \in \mathcal {S}\) and \(S_j\cap Y\ \text {is monochromatic} \}\).
Claim 34
\(T(Y)=f(Y)\) for all \(Y \subseteq X\).
Proof
First note that if \((X,\mathcal {S},c)\) is feasible, so is \((Y,\mathcal {S}|_Y,c)\). We now prove the claim by induction on |Y|. For \(|Y|=0, Y=\emptyset \) and therefore \(f(Y)=T(Y)=0\). For \(Y \ne \emptyset \), let \((S_1,\dots ,S_l)\) be a solution of minimum size for \((Y,\mathcal {S}|_Y,c)\) . Since it is a legal solution, \(S_1 \cap Y\) is monochromatic and non–empty. By the minimality of l, the tuple \((S_2,\dots ,S_l)\) is a minimal size solution to \(Y\setminus S_1\) with the same coloring. Thus, \(f(Y)= l = f(Y \setminus S_1)+1= T(Y \setminus S_1)+1=T(Y)\), where the last equalities derives from the induction step and the minimality of l. \(\square \)
In order to construct a solution, in each cell T(Y) save which set achieved the minimum value when constructing T. Starting from T(X) by adding at each step the corresponding set to the end of the tuple and updating the color function, we construct a legal solution of minimum size.
Complexity: The algorithm uses a table of size \(2^n\), where each cell contains a set index and a value of a solution. Thus, the space complexity is \(O^*(2^n)\).
Regarding the time complexity, building each cell takes O(m) time. Given the table T, constructing the solution tuple takes O(n) time. If we assume the computational model allows random access to the table, the running time is \(O^*(2^n)\).
Extension for Min–k–OC: We can think of a solution to k–OC as k monochromatic layers of sets. The algorithm for Min–k–OC is similar to the algorithm for Min–OC, with the following modulation. Given an input (X, S, c), for every \(Y \subseteq X, a \in \{0,1\}, j\le k\), we define the function f(Y, j, a) to be the size of a minimal solution for \((Y,\mathcal {S}|_Y, c)\) using j layers, where the first layer is of color a, or \(\infty \) if it is not feasible. Building the table T:
-
\(T(\emptyset , j,a)=0\) for all j, a
-
\(T(Y,0,a)=\infty \) for every \(Y \ne \emptyset \)
-
Else,
$$\begin{aligned}&T(Y,k,a)\\ = \min \text { }&\{T(Y\setminus S_j,k,a)+1 : S_j \cap Y \text { is monochromatic with color } a) \} ,\\&\{T(Y\setminus S_j,k-1,\overline{a})+1 : S_j \cap Y \text { is monochromatic with color } \overline{a}) \}, \\&\infty \end{aligned}$$The equivalence of T and f can be shown by a simple induction similarly to Claim 34. In order to build a solution, we save at each step which set achieved the minimum. Starting from T(X, k, 0), by adding at each step the corresponding set to the end of the tuple and updating the color function, we obtain a solution of minimum size.
Since we can assume \(k \le n\), the time and space complexity remains \(O^*(2^n)\).
Appendix C: Integrality Gap for Min–3–OC(\(\alpha _0,\alpha _1\))
In this section, we discuss the tightness of the rounding procedure and the integrality gap of the Linear Program for the Min–3–OC(\(\alpha _0,\alpha _1\)) problem described in Sect. 4.2.1.
1.1 C.1 Tightness of Rounding
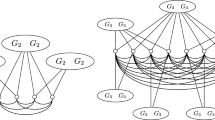
Consider a complete \(\alpha _1\)–partite hypergraph H on n vertices divided into \(\alpha _1\) sets \(U_1,\dots ,U_{\alpha _1}\) of size \(|U_i|=\frac{n}{\alpha _1}\), with edges \(U_1 \times U_2 \cdots \times U_{\alpha _1}\). In addition, we introduce n complete \((\alpha _0-1)\)-partite hypergraphs \(G_1,\dots ,G_n\). Each \(G_i\) has n vertices divided into \(\alpha _0-1\) sets \(V^i_1,\dots ,V^i_{\alpha _0-1}\) of size \(|V_1^i|=\frac{n}{\alpha _0-1}\) and edges \(V^i_1 \times V^i_2,\dots ,V^i_{\alpha _0-1}\). Using these graphs we define an instance of 3–OC(\(\alpha _0,\alpha _1\)).
The Elements: The edges of H are the elements of color 1. The edges of \(G_1,\dots ,G_n\) are the elements of color 0.
The sets: For each vertex v in \(G_i\) we introduce a set \(S_v\) containing all edges touching v in \(G_i\). For each vertex \(u_i\) in H, we add a set \(S_{u_i}\) containing all edges touching \(u_i\) in H and all edges of the graph \(G_i\).
Note that each element of color 0 is included in \(\alpha _0\) sets, and each element of color 1 is included in \(\alpha _1\) sets.
Optimal Value: In order to cover all elements of color 1 i.e the edges of H in the second layer, we need at least \(\frac{n}{\alpha _1}\) sets of the form \(S_{u_i}\). Thus, we need to cover at least \(\frac{n}{\alpha _1}\) graphs \(G_i\) edges in the first layer, each requires \(\frac{n}{\alpha _0-1}\) sets of the form \(S_v\). The rest of the graphs \(G_i\) can be covered in the third layer with the sets \(S_{u_i}\) not used in the second layer. All together, the optimal value is
The Value Achieved by the Algorithm: In order to satisfy the constraints regarding the elements of color 1 in a minimal way, for each set associated with a vertex in H, give value \(y^2=\frac{1}{\alpha _1}\). In order to cover the elements of color 0, for each set associated with a vertex of \(G_i\), give value \(y^1= \frac{1}{\alpha _1(\alpha _0-1)}\), and for all sets \(S_{u_i}\) for \(u_i \in V(H)\), give value \(y^3=1-\frac{1}{\alpha _1}\). In total the LP value is \(\frac{n^2}{\alpha _1(\alpha _0-1)}+n\), which is equal to the optimal value.
Using the rounding procedure, a solution of size \(n^2+n\) is obtained and therefore a ratio of approximately \(\alpha _1(\alpha _0-1)\).
1.2 C.2 Integrality Gap
We give two bounds for the integrality gap, one for Min–3–OC(\(\alpha _1,\alpha _0\)) with constant \(\alpha _1, \alpha _0\), and one for Min–3–OC without limiting the number of sets an element is contained in.
1.2.1 C.2.1 Integrality Gap for Constant \(\alpha _0,\alpha _1\)
We show an example where the integrality gap is approximately \(\alpha _1(\alpha _0-1)\).
For parameters n, \(\alpha _1\) and \( \alpha _0\) consider the following instance.
-
Elements of color 1: The edges of an \(\alpha _1\)-uniform complete hypergraph on \(b=\sqrt{n}\) vertices denoted by G. (\(\left( {\begin{array}{c}b\\ \alpha _1\end{array}}\right) \) elements.)
-
Elements of color 0: The edges of \((\alpha _0-1)\)-uniform complete hypergraphs on n vertices denoted by \(H_1,\dots ,H_b\). (\(b \cdot \left( {\begin{array}{c}n\\ \alpha _0-1\end{array}}\right) \) elements.)
-
The sets: For each vertex v in each \(H_j\), introduce a set \(S_v\) containing all edges touching v in \(H_j\). For each vertex \(u_i\) in G, introduce a set \(T_{u_i}\) containing all edges touching \(u_i\) and in addition all edges of the graph \(H_i\).
LP Value: In order to satisfy the constraints regarding the elements of color 1 i.e the edges of G, for all sets \(S_{u_1},\dots ,S_{u_b}\) set value \(y^2_j=\frac{1}{\alpha _1}\). Regarding the constraints corresponding the elements of color 0 i.e the edges of \(H_1,\dots ,H_b\), define \(z_e=\frac{1}{\alpha _1}\), \(y^1_{j}=\frac{1}{\alpha _1(\alpha _0-1)}\), \(y^3_j=1-\frac{1}{\alpha _1}\) for all variables. This defines a feasible solution to the LP with value \(b+\frac{bn}{\alpha _1(\alpha _0-1)} \approx \frac{n^{1\frac{1}{2}}}{\alpha _1(\alpha _0-1)}\).
Optimal Value: In order to cover the elements of color 1 in the second layer, we need at least \(b-\alpha _1 -1\) sets of the form \(S_{u_i}\). Hence, at least \(b-\alpha _1-1\) Graphs \(H_i\) edges are covered in the first layer, each requires at least \(n-\alpha _0-2\) monochromatic sets of the form \(S_v\). The rest of the elements with color 0 can be covered in the third layer using the sets \(S_{u_i}\) that were not used in the second layer. Hence, any solution consists of at least \(b+(b-1-\alpha _1)\cdot (n-\alpha _0-2)= \Theta (n^{1\frac{1}{2}})\) sets (we assume \(\alpha _1, \alpha _0\) are constants).
Thus, we get a ratio of approximately \(\alpha _1(\alpha _0-1)\).
1.2.2 C.2.2 Integrality Gap for Min–3–OC
Distinguishing between a random graph \(G(n,n^{-1/2})\) and a random graph \(G(n,n^{-1/2})\) with an induced subgraph on \(\sqrt{n}\) vertices replaced with \(G(\sqrt{n}, n^{-(\frac{1}{4}+\epsilon )} )\) is an open problem, and seems to be a barrier for obtaining a better approximation algorithm for DkS [3]. We will use the reduction from DkS to Min–3–OC described in Sect. 4.1 in order to build an example for which w.h.p. the integrality gap is approximately \(N^{\frac{1}{10}}\), where N is the number of elements.
The parameters we use in the notation of the reduction are
Let G(V, E) be a random graph picked from \(G(n,n^{-1/2})\). We build an instance of 3–OC denoted as \((X,\mathcal {S},c)\) in the following way.
The Elements: For \(t=q/k=\frac{n^{1/4}}{2}\), for each \(v \in V\) introduce t elements \(v_1,\dots ,v_t\) of color 0. In addition, introduce \(\frac{q}{2\ln n}\) elements \(B=\{u_1,\dots ,u_{\frac{q}{2\ln (n)}}\}\) of color 1 (\(N=\Theta (n^{1 \frac{1}{4}})\)).
The Sets: Include X as a set. For every \(v\in V\), \(i \in [t]\) add a singleton \(\{v_i\}\). For each \((v,w) \in E\) introduce a random set \(S_{(v,w)}=\{v_1,\dots ,v_t,w_1,\dots ,w_t,u_i\}\), where \(u_i\) is chosen uniformly at random from B.
Using union bound, with high probability G is a NO instance of \(\rho \)–DkS–gap problem. Thus, every set of k vertices touches at most \(q/\rho \) edges. If G is a NO instance as stated in Claim 27 in Sect. 4.1, the optimal value for \((X,\mathcal {S},c)\) is at least
LP Value: With high probability the number of edges in G is at least \(\frac{n^{1\frac{1}{2}}}{2}\). Using Chernoff and union bound, w.h.p. every element \(u \in B\) is part of at least \(\beta \cdot n^{\frac{3}{4}} \cdot \ln n\) sets of the form \(S_{e}\) for some constant \(\beta \).
In order to satisfy the constrains regarding the elements of color 1 i.e the elements in B, for each set \(S_e\) give value \(y^2_e= \frac{1}{\beta \cdot n^{\frac{3}{4}} \cdot \ln n}\). Regarding the elements of color 0 (the t copies of V) define \(z_{v_i}=y^1_{\{v_i\}}= \frac{1}{\beta \cdot n^{\frac{3}{4}} \cdot \ln n}\) for each \(v_i\), and for the variable associated with the set X give value \(y^3_{X}=1\). By Chernoff w.h.p the number of edges is at most \(2n^{1\frac{1}{2}}\). All together w.h.p we get a solution for the LP of size
Thus, the ratio between the optimal value and the value of the LP is at least \(\Theta (n^{1/8})=\Theta (N^{1/10})\)
Appendix D: Covering Some Elements Correctly
First we show that the OC problem is equivalent to the problem of covering only the elements of color 1 correctly without “miscoloring” the other elements. This problem was presented in [10] as the (P, N) covering problem, though here we refer to it as (P, N)–OC problem. Then we show that OC is also equivalent to the problem of covering only one designated element correctly.
1.1 D.1 Covering the Elements of Color 1: the (P, N)–OC Problem
In the (P, N)–OC problem, the input is the same as in the OC problem, a set of element X, a color function \(c:X \rightarrow \{0,1\}\), and a collection \(\mathcal {S}\) of m subsets of X. The goal is to output a tuple \(T=(S_1,S_2,\dots ,S_k)\) of sets from \(\mathcal {S}\) and coloring \(g:\{S_i\}_{i=1}^k \rightarrow \{0,1\}\) such that:
-
All elements of color 1 are covered: \(\{x \in X : c(x)=1 \} \subseteq \bigcup _{j=1}^k S_j\).
-
T, g is a legal solution for \( (\bigcup _{j=1}^k S_j, \mathcal {S},c)\) as an instance of OC.
We show gap preserving reductions between (P, N)–OC and OC.
1.1.1 D.1.1 From the OC Problem to (P, N)–OC
Given input \((X,\mathcal {S},c)\) to OC, we create an instance of (P, N)–OC as follows. We add an element \(x_1\) with color \(c(x_1)=1\) and a set containing \(x_1\) and all elements of color 0 denoted by \(T=\{x_1\} \cup \{x \in X : c(x)=0 \} \).
Consider \((X\cup \{x_1\}, \mathcal {S} \cup \{T\},c)\) as an input to (P, N)–OC. Since T is the only set containing \(x_1\), in every solution the set T is included with color \(g(T)=1\). Thus, in order for a solution to be legal, all elements in X with color 0 are needed to be covered by sets from \(\mathcal {S}\). In addition in every solution all elements of color 1 are covered correctly by the definition of (P, N)–cover. Since T covers correctly only \(x_1\), we can assume it is used as the last set in every solution tuple. Hence, given a solution for \((X\cup \{x_1\}, \mathcal {S} \cup \{T\},c)\) as an instance of (P, N)–OC by removing the set T we obtain a solution for \((X,\mathcal {S},c)\) as an instance of OC.
On the other hand every solution to \((X,\mathcal {S},c)\) can be extended to a solution for \((X\cup \{x_1\}, \mathcal {S} \cup \{T\},c)\) as an instance of (P, N)–OC by concatenating T at the end of the tuple with color 1. Therefore, \((X,\mathcal {S},c)\) has a solution of size k if and only if \((X\cup \{x_1\}, \mathcal {S} \cup \{T\},c)\) has a solution of size \(k+1\).
1.1.2 D.1.2 From the (P, N)–OC Problem to OC
Similarly to the previous reduction, given input \((X,\mathcal {S},c)\) to (P, N)–OC, we create an instance of OC as follows. We add to X an element \(x_0\) with color \(c(x_0)=0\) and a set \(T=\{x_0\} \cup X\).
Note that T is the only set containing \(x_0\), therefor in every solution for \((X\cup \{x_0\}, \mathcal {S} \cup \{T\},c)\) as an input to OC the set T is included with color \(g(T)=0\). Since T covers correctly all elements of color 0 and “miscolor” all elements of color 1, in every solution to \((X\cup \{x_0\}, \mathcal {S} \cup \{T\},c)\), all elements in X with color 1 are needed to be covered correctly by sets from \(\mathcal {S}\). Hence, given a solution for \((X\cup \{x_0\}, \mathcal {S} \cup \{T\},c)\) as an instance of OC, by removing the set T we obtain a solution for \((X,\mathcal {S},c)\) as an instance of (P, N)–OC.
On the other hand, every solution to \((X,\mathcal {S},c)\) as an input to (P, N)–OC can be extended to a solution for \((X\cup \{x_0\}, \mathcal {S} \cup \{T\},c)\) by concatenating T at the end of the tuple with color 0. Thus we can conclude that \((X,\mathcal {S},c)\) has a solution of size k if and only if \((X\cup \{x_0\}, \mathcal {S} \cup \{T\},c)\) has a solution of size \(k+1\).
1.2 D.2 Covering One Designated Element: The \(x_0\)–OC Problem
In the \(x_0\)–OC problem, the input is a finite set of n elements X, a color function \(c:X \rightarrow \{0,1\}\), a collection \(\mathcal {S}\) of m subsets of X, and a designated element \(x_0 \in X\). The goal is to output a tuple of sets \(T=(S_1,\dots ,S_k)\) and coloring \(g:\{S_i\}_{i=1}^k \rightarrow \{0,1\}\) such that:
-
\(x_0 \in \bigcup _{j=1}^k S_j\)
-
T, g is a solution for \( (\bigcup _{j=1}^k S_j, \mathcal {S},c)\) as an instance of OC.
We show gap preserving reductions between \(x_0\)–OC and OC.
1.2.1 D.2.1 From the OC Problem to \(x_0\)–OC
Given input \((X,\mathcal {S},c)\) to OC, construct an input to \(x_0\)–OC denoted by \((X^\prime ,\mathcal {S}^\prime ,c^\prime ,x_0)\) as follows. We introduce two new elements \(x_0,x_1\), and two new sets \(T_0=\{x_0,x_1\}\cup c^{-1}(1)\) , \(T_1=\{x_1\}\cup c^{-1}(0)\). Define the elements to be \(X^\prime =X \cup \{x_0,x_1\}\), the sets \(\mathcal {S^\prime }=\mathcal {S} \cup \{T_0,T_1\}\) , and the color function \(c^\prime (x_0)=0\) , \(c^\prime (x_1)=1\) , \(c^\prime (x)=c(x)\) \(\forall x\in X\).
The only set containing \(x_0\) is \(T_0\), and the only sets containing \(x_1\) are \(T_0\) and \(T_1\). We can assume that in every solution \(x_0\) is contained in the last set of the tuple, and therefor that every solution to \((X^\prime , \mathcal {S}^\prime , c^\prime , x_0)\) contains \(T_0\) with color 0 as the last set, and \(T_1\) with color 1. Given a solution \((S_1,\dots ,S_i,T_1,S_{i+1},\dots ,S_k,T_0)\) with coloring g for \((X^\prime ,\mathcal {S}^\prime ,c^\prime ,x_0)\), by the definition of \(T_1\), the sets \(S_1,\dots ,S_i\) cover all the elements of color 0 in X correctly. Similarly, all elements of color 1 in X are covered correctly by the sets \(S_1,\dots ,S_k\). Hence, the tuple \((S_1,\dots ,S_k)\) with the same coloring g is a solution for \((X, \mathcal {S},c)\) as an instance of OC.
On the other hand, if \((S_1,\dots ,S_k)\) and g is a solution for \((X,\mathcal {S},c)\), the tuple \((S_1,\dots ,S_k,T_1,T_0)\) with coloring \(g^\prime (T_0)=0, g^\prime (T_1)=1,g^\prime (S_j)=g(S_j)\) is a solution for \((X^\prime ,\mathcal {S^\prime },c^\prime )\).
We can conclude that \((X,\mathcal {S},c)\) has a solution of size k if and only if \((X^\prime ,\mathcal {S}^\prime ,c^\prime ,x_0)\) has a solution of size \(k+2\).
1.2.2 D.2.2 From the \(x_0\)–OC Problem to OC
Starting from an input \((X, \mathcal {S}, c, x_0)\) to the \(x_0\)–OC problem, construct an instance of the OC problem denoted by \((X^\prime ,\mathcal {S}^\prime ,c^\prime )\) as follows. Without loss of generality we can assume that \(c(x_0)=0\). We introduce two new elements \(y_1,y_0\) and two new sets \(T_0=\{y_1,y_0\} \cup X \setminus \{x_0\}\) and \(T_1=\{y_1,x_0\}\cup c^{-1}(1)\). Define the elements to be \(X^\prime =X\cup \{y_1,y_0\}\), the sets \(\mathcal {S^\prime }=\mathcal {S}\cup \{T_0,T_1\}\) and the color function \(c^\prime (y_1)=1\) , \(c^\prime (y_0)=0\) , \(c^\prime (x)=c(x)\) \(\forall x\in X\).
Observe that any solution to \((X, \mathcal {S}, c, x_0)\) can be extended to a solution for \((X^\prime ,\mathcal {S^\prime },c^\prime )\) by concatenating \(T_1\) and then \(T_0\) at the end of the tuple with colors \(g(T_0)=0\) and \(g(T_1)=1\).
On the other hand, since the only set containing \(y_0\) is \(T_0\) and the only sets containing \(y_1\) are \(T_0\) and \(T_1\), every solution to \((X^\prime ,\mathcal {S^\prime },c)\) contains the set \(T_0\) with color 0 and later in the tuple \(T_1\) with color 1. Given a solution \((S_1,\dots ,S_i,T_1,S_{i+1},\dots ,S_k,T_0,S_{k+1},\dots ,S_{\ell })\) to \((X^\prime ,\mathcal {S}^\prime ,c^\prime )\), the set \(T_1\) colors the element \(x_0\) with color 1. Thus, \(x_0 \in \bigcup _{j=1}^i S_j\) and the tuple \((S_1,\dots ,S_i)\) is a solution to \((X, \mathcal {S}, c, x_0)\). We can conclude that \((X, \mathcal {S}, c, x_0)\) has a solution of size at most k if and only if \((X^\prime ,\mathcal {S}^\prime ,c^\prime )\) has a solution of size at most \(k+2\).
Rights and permissions
About this article

Cite this article
Feige, U., Hitron, Y. The Ordered Covering Problem. Algorithmica 80, 2874–2908 (2018). https://doi.org/10.1007/s00453-017-0357-6
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00453-017-0357-6