
Abstract
This paper presents a new parameter free partially penalized immersed finite element method and convergence analysis for solving second order elliptic interface problems. A lifting operator is introduced on interface edges to ensure the coercivity of the method without requiring an ad-hoc stabilization parameter. The optimal approximation capabilities of the immersed finite element space is proved via a novel new approach that is much simpler than that in the literature. A new trace inequality which is necessary to prove the optimal convergence of immersed finite element methods is established on interface elements. Optimal error estimates are derived rigorously with the constant independent of the interface location relative to the mesh. The new method and analysis have also been extended to variable coefficients and three-dimensional problems. Numerical examples are also provided to confirm the theoretical analysis and efficiency of the new method.



Similar content being viewed by others
References
Adjerid, S., Babuška, I., Guo, R., Lin, T.: An enriched immersed finite element method for interface problems with nonhomogeneous jump conditions. arXiv preprint arXiv:2004.13244 (2020)
Adjerid, S., Ben-Romdhane, M., Lin, T.: Higher degree immersed finite element spaces constructed according to the actual interface. Comput. Math. Appl. 75, 1868–1881 (2018)
Adjerid, S., Guo, R., Lin, T.: High degree immersed finite element spaces by a least squares method. Int. J. Numer. Anal. Model. 14, 604–626 (2017)
Babuška, I.: The finite element method for elliptic equations with discontinuous coefficients. Computing 5, 207–213 (1970)
Bramble, J.H., King, J.T.: A robust finite element method for nonhomogeneous Dirichlet problems in domains with curved boundaries. Math. Comp. 63, 1–17 (1994)
Bramble, J.H., King, J.T.: A finite element method for interface problems in domains with smooth boundaries and interfaces. Adv. Comput. Math. 6, 109–138 (1996)
Brenner, S.C., Scott, L.R.: The Mathematical Theory of Finite Element Methods. Texts in Applied Mathematics, vol. 15. Springer, Berlin (2008)
Burman, E., Guzmám, J., Sánchez, M., Sarkis, M.: Robust flux error estimation of an unfitted Nitsche method for high-contrast interface problems. IMA J. Numer. Anal. 38, 646–668 (2018)
Chen, Z., Zou, J.: Finite element methods and their convergence for elliptic and parabolic interface problems. Numer. Math. 79, 175–202 (1998)
Chu, C.-C., Graham, I.G., Hou, T.-Y.: A new multiscale finite element method for high-contrast elliptic interface problems. Math. Comp. 79, 1915–1955 (2010)
Di Pietro, D.A., Ern, A.: Mathematical Aspects of Discontinuous Galerkin Methods, volume 69. Mathématiques & Applications (Berlin) [Mathematics & Applications]. Springer, Heidelberg (2012)
Foote, R.L.: Regularity of the distance function. Proc. Am. Math. Soc. 92, 153–155 (1984)
Frei, S., Richter, T.: A locally modified parametric finite element method for interface problems. SIAM J. Numer. Anal. 52, 2315–2334 (2014)
Fries, T., Belytschko, T.: The extended/generalized finite element method: an overview of the method and its applications. Int. J. Numer. Meth. Eng. 84, 253–304 (2010)
Gilbarg, D., Trudinger, N.S.: Elliptic Partial Differential Equations of Second Order. Classics in Mathematics. Springer, Berlin (2001). Reprint of the 1998edition
Guo, R.: Solving parabolic moving interface problems with dynamical immersed spaces on unfitted meshes: fully discrete analysis. SIAM J. Numer. Anal. 59, 797–828 (2021)
Guo, R., Lin, T.: A higher degree immersed finite element method based on a Cauchy extension for elliptic interface problems. SIAM J. Numer. Anal. 57, 1545–1573 (2019)
Guo, R., Lin, T.: A group of immersed finite-element spaces for elliptic interface problems. IMA J. Numer. Anal. 39, 482–511 (2019)
Guo, R., Lin, T.: An immersed finite element method for elliptic interface problems in three dimensions. J. Comput. Phys. 414, 109478 (2020)
Guo, R., Lin, T., Zhang, X.: Nonconforming immersed finite element spaces for elliptic interface problems. Comput. Math. Appl. 75, 2002–2016 (2018)
Guo, R., Lin, T., Zhuang, Q.: Improved error estimation for the partially penalized immersed finite element methods for elliptic interface problems. Int. J. Numer. Anal. Model. 16, 575–589 (2019)
Guzmán, J., Sánchez, M., Sarkis, M.: Higher-order finite element methods for elliptic problems with interfaces. ESAIM Math. Model. Numer. Anal. 50, 1561–1583 (2016)
Guzmán, J., Sánchez, M., Sarkis, M.: On the accuracy of finite element approximations to a class of interface problems. Math. Comp. 85, 2071–2098 (2016)
Guzmán, J., Sánchez, M., Sarkis, M.: A finite element method for high-contrast interface problems with error estimates independent of contrast. J. Sci. Comput. 73, 330–365 (2017)
Hansbo, A., Hansbo, P.: An unfitted finite element method, based on Nitsche’s method, for elliptic interface problems. Comput. Methods Appl. Mech. Eng. 191, 5537–5552 (2002)
He, X., Lin, T., Lin, Y.: Approximation capability of a bilinear immersed finite element space. Numer. Methods Part. Differ. Equ. 24, 1265–1300 (2008)
He, X., Lin, T., Lin, Y.: The convergence of the bilinear and linear immersed finite element solutions to interface problems. Numer. Methods Part. Differ. Equ. 28, 312–330 (2012)
He, X., Lin, T., Lin, Y.: Immersed finite element methods for elliptic interface problems with non-homogeneous jump conditions. Int. J. Numer. Anal. Model. 8, 284–301 (2012)
Hou, S., Liu, X.: A numerical method for solving variable coefficient elliptic equation with interfaces. J. Comput. Phys. 202, 411–445 (2005)
Hou, T., Wu, X., Zhang, Y.: Removing the cell resonance error in the multiscale finite element method via a Petrov–Galerkin formulation. Comm. Math. Sci. 2, 185–205 (2004)
Huang, J., Zou, J.: Some new a priori estimates for second-order elliptic and parabolic interface problems. J. Differ. Equ. 184, 570–586 (2002)
Huang, P., Li, Z.: Partially penalized ife methods and convergence analysis for elasticity interface problems. J. Comput. Appl. Math. 382, 113059 (2021)
Ji, H., Chen, J., Li, Z.: A symmetric and consistent immersed finite element method for interface problems. J. Sci. Comput. 61, 533–557 (2014)
Ji, H., Weng, Z., Zhang, Q.: An augmented immersed finite element method for variable coefficient elliptic interface problems in two and three dimensions. J. Comput. Phys. 418, 109631 (2020)
Ji, H., Zhang, Q., Wang, Q., Xie, Y.: A partially penalised immersed finite element method for elliptic interface problems with non-homogeneous jump conditions. East Asian J. Appl. Math. 8, 1–23 (2018)
Ji, H., Zhang, Q., Zhang, B.: Inf-sup stability of Petrov–Galerkin immersed finite element methods for one-dimensional elliptic interface problems. Numer. Methods Part. Differ. Equ. 34, 1917–1932 (2018)
Kafafy, R., Lin, T., Lin, Y., Wang, J.: Three-dimensional immersed finite element methods for electric field simulation in composite materials. Int. J. Numer. Methods Eng. 64, 940–972 (2005)
Lehrenfeld, C.: Removing the stabilization parameter in fitted and unfitted symmetric Nitsche formulations. arXiv preprint arXiv:1603.00617 (2016)
Li, J., Markus, J., Wohlmuth, B., Zou, J.: Optimal a priori estimates for higher order finite elements for elliptic interface problems. Appl. Numer. Math. 60, 19–37 (2010)
Li, Z.: The immersed interface method using a finite element formulation. Appl. Numer. Math. 27, 253–267 (1998)
Li, Z., Ito, K.: The Immersed Interface Method: Numerical Solutions of PDEs Involving Interfaces and Irregular Domains. Frontiers in Applied Mathematics, vol. 33. SIAM, Philadelphia (2006)
Li, Z., Lin, T., Lin, Y., Rogers, R.: An immersed finite element space and its approximation capability. Numer. Methods Part. Differ. Equ. 20, 338–367 (2004)
Li, Z., Lin, T., Wu, X.: New Cartesian grid methods for interface problems using the finite element formulation. Numer. Math. 96, 61–98 (2003)
Lin, T., Lin, Y., Zhang, X.: Partially penalized immersed finite element methods for elliptic interface problems. SIAM J. Numer. Anal. 53, 1121–1144 (2015)
Lin, T., Yang, Q., Zhang, X.: Partially penalized immersed finite element methods for parabolic interface problems. Numer. Methods Part. Differ. Equ. 31, 1925–1947 (2015)
Peskin, C.: Numerical analysis of blood flow in the heart. J. Comput. Phys. 25, 220–252 (1977)
Wang, H., Chen, J., Sun, P., Qin, F.: A conforming enriched finite element method for elliptic interface problems. Appl. Numer. Math. 127, 1–17 (2018)
Wu, H., Xiao, Y.: An unfitted \(hp\)-interface penalty finite element method for elliptic interface problems. J. Comput. Math. 37, 316–339 (2019)
Xiao, Y., Xu, J., Wang, F.: High-order extended finite element methods for solving interface problems. Comput. Methods Appl. Mech. Eng. 364, 112964 (2016)
Xu, J.: Error estimates of the finite element method for the 2nd order elliptic equations with discontinuous coefficients. J. Xiangtan Univ. 1, 1–5 (1982)
Zou, J., Huang, J.: Uniform a priori estimates for elliptic and static Maxwell interface problems. Discrete Contin. Dyn. Syst. Ser. B 7, 145–170 (2007)
Acknowledgements
The authors would like to thank the anonymous referees sincerely for their careful reading and helpful suggestions that improved the quality of this paper.
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
H. Ji is partially supported by the National Natural Science Foundation of China (Grants Nos. 11701291, 12101327 and 11801281) and the Natural Science Foundation of Jiangsu Province (Grant No. BK20200848); F. Wang is partially supported by the National Natural Science Foundation of China (Grant Nos. 12071227 and 11871281) and the Natural Science Foundation of the Jiangsu Higher Education Institutions of China (Grant No. 20KJA110001) and the National Key Research and Development Program of China (No. 2020YFA0713803); J. Chen is partially supported by the National Natural Science Foundation of China (Grant Nos. 11871281, 11731007 and 12071227); Z. Li is partially supported by a Simon Grant (No. 633724).
Appendices
Appendix A: Technical results for the 2D cases
1.1 Proof of Lemma 1
Proof
\(:\) Note that when T is an isosceles right triangle, the proof can be found in the literature, see for example [18, 43]. We now provide the proof for \(\alpha _{max}\le \pi /2\). Given a function \(\phi \in S_h(T)\), if we known the jump \(c_1:=(\nabla \phi ^+-\nabla \phi ^-)\cdot \mathbf {n}_h\) which is a constant, then the function \(\phi \) can be written as
with
where \(I_{h,T}\) is the standard linear nodal interpolation operator on \(T, \varGamma _{h,T}^{ext}\) is a straight line containing \(\varGamma _h\cap T\), and \(\mathrm{dist}(x, \varGamma _{h,T}^{ext})\) is the distance between x and \(\varGamma _{h,T}^{ext}\). Substituting (A.1) into the third identity in (2.4), we obtain the following equation for \(c_1\),
Clearly, if we can prove
then
which implies that the equation (A.3) has a unique solution. Substituting the solution of (A.3) into (A.1) yields
which proves the lemma.
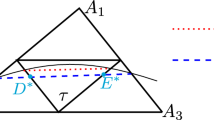
Next, we prove (A.4). There are two cases. Case \(\mathrm I\): \(\triangle A_2DE=T_h^+\) (see Fig. 4a) and Case \(\mathrm II\): \(\triangle A_2DE=T_h^-\). In Case \(\mathrm I\), since \(w(A_1)=w(A_3)=0\), it holds
where \(A_{2,\perp }\) is the orthogonal projection of the point \(A_2\) onto the line DE, and \(\lambda _i(x)\) is the standard linear basis function defined by \(\lambda _i(A_j)=\delta _{ij}\) (the Kronecker symbol). The polynomial extension of \(\lambda _i(x)\) is also denoted by \(\lambda _i(x)\) for simplicity of notations. In Case II (\(\triangle A_2DE=T_h^-\)), for the sake of clarity, we replace the notations \(w, \mathbf {n}_h\) and \(d_{\varGamma _{h,T}^{ext}}\) by \(\tilde{w}\), \(\tilde{\mathbf {n}}_h\) and \(\tilde{d}_{\varGamma _{h,T}^{ext}}\), respectively. Obviously, \(\tilde{\mathbf {n}}_h=-\mathbf {n}_h\) and \(\tilde{d}_{\varGamma _{h,T}^{ext}}(A_2)=-|A_2A_{2,\perp }|\). Similar to (A.7), we have
However, using the signed distance function \(\tilde{d}_{\varGamma _{h,T}^{ext}}\) we also have
Thus, it suffices to consider Case \(\mathrm I\): \(\triangle A_2DE=T_h^+\) which is shown in Fig. 4a.
If \(A_2\) and \(A_{2,\perp }\) are on different sides of the line \(A_1A_3\) (see Fig. 4b for an illustration), then we have \(\angle A_1A_3A_2>\angle A_3QA_2>\frac{\pi }{2}\). This contradicts the condition \(\alpha _{max}\le \frac{\pi }{2}\). Thus, we conclude that \(A_2\) and \(A_{2,\perp }\) are on the same side of the line \(A_1A_3\), which together with the fact \(\lambda _2(A_2)=1\), \(\lambda _2(A_1)=\lambda _2(A_3)=0\), leads to
On the other hand, using the condition \(\angle A_2A_3A_1\) and \(\angle A_2A_1A_3\le \alpha _{max}\le \frac{\pi }{2}\), we conclude \(\overrightarrow{A_1A_3}\cdot \mathbf{t }_h>0\), which implies
where \(\mathbf{n }_{A_1A_3}\) is the unit normal vector of the line \(A_1A_3\) pointing toward \(A_2\). \(\square \)
A counter example for \(\alpha _{max}>\frac{\pi }{2}\):
By a direct calculation, we find that the shape function \(\phi (x)\) cannot be determined by \(\phi (A_i), i=1,2,3\) in this case.
1.2 Proof of Lemma 6
Proof
First we present the following useful inequality about basis functions of the linear IFE space \(S_h(T)\). Let \(\phi _{A_i}\in S_h(T)\) be the basis function corresponding to a vertex \(A_i\) of T defined by \(\phi _{A_i}(A_j)=\delta _{ij}\). From (A.6) and (A.4), it is easy to prove that
where the constant C is independent of h and the interface location relative to the mesh.
Derive upper bounds of\(|\varUpsilon (x)|_{H^m(T)},~m=0,1\). We construct \(\varUpsilon \) as follows,
where the function v is linear and satisfies
Here \(I^{\mathrm{IFE}}_{h,T} z\) interpolates nodal values of v defined on T, i.e., \(I^{\mathrm{IFE}}_{h,T} z=\sum _{i}v(A_i)\phi _{A_i}\). It is easy to verify that the constructed function \(\varUpsilon \) satisfies the definitions (4.9)–(4.10). Since \(v(D)=v(E)=0\), we have \(\nabla v\cdot \mathbf{t }_h=0\). Thus,
For any point \(P\in T_h^+\), using the relation \(v(P)=v(D)+\nabla v\cdot \overrightarrow{DP}\), we have
From (A.11) and (A.10), we get the desired estimates
Derive upper bounds of \(|\varPsi _i(x)|_{H^m(T^+_h\cup T_h^-)},~i=D,E,~m=0,1\). Without loss of generality, we assume that the interface \(\varGamma \) intersects with the line segments \(\overline{A_1A_2}\) and \(\overline{A_2A_3}\) at points D, E, respectively, see Fig. 4a for an illustration. Since the triangulation is regular, we assume that there are two constants \(\alpha _{min}\) and \(\alpha _{max}\) such that \(\alpha _{min}\le \angle A_1A_2A_3\le \alpha _{max}\).
Let \(D^\prime \) and \(E^\prime \) be two points on the line DE such that \(\angle DA_2E=\angle D^\prime A_1E^\prime \) and \(|A_2D^\prime |=|A_2E^\prime |\), see Fig. 4c for an illustration. Then, we have the key inequality
Similar to (A.11), we construct \(\varPsi _D(x)\) as follows,
where the function v is linear and satisfies
From (A.15), we have
If \(A_{2,\perp }\in \overline{T}\), then \(|A_{2,\perp }E|\le |DE|\) and \(|v(A_2)|=|v(A_{2,\perp })|\le 1\). Otherwise, we have \(\angle A_1A_2A_3<\pi /2\). Using (A.13), we obtain

A diagram of an interface element
where we have used the fact that the line DE cannot be parallel to the line \(A_1A_2\). Hence, we have
Using (A.14) and (A.10), we have
Since v is linear, we know that
where we have used the equality (A.13). It follows from (A.14) and (A.10) that
The upper bound estimate for \(\varPsi _E\) is analogous. \(\square \)
Appendix B: Technical results for the 3D cases
1.1 Proof of Lemma 16
Proof
\(:\) Similar to (A.6) for the 2D cases, we also have
where \(T_h^+\) and \(T_h^-\) in the definition of w in (A.2) are replaced by \(T^+\) and \(T^-\), that is,
It suffices to prove the following relation:
There are only two types of interface elements. Type I interface element: the plane \(\varGamma _{h,T}^{ext}\) cuts three edges of the tetrahedron (see Fig. 5); Type II interface element: the plane \(\varGamma _{h,T}^{ext}\) cuts four edges of the tetrahedron (see Fig. 6).

Type I interface element in 3D. The plane \(\varGamma _{h,T}^{ext}\) cuts three edges of the element
For Type I interface element, we take the tetrahedron in Fig. 5 as an illustration. Similar to the 2D cases, we only need to consider the case \(A_1\in T^+\). Let \(A_{i,\perp }\) be the orthogonal projection of the point \(A_i\) onto the plane \(\varGamma _{h,T}^{ext}\). Similar to (A.7), we have
where \(\lambda _i\) is the standard 3D linear basis function associated with the vertex \(A_i\). Let H be the orthogonal projection of the point \(A_1\) onto the plane \(A_2A_3A_4\). The dihedral angle between \(A_1A_2A_3\) and \(A_4A_2A_3\) is denoted by \(A_1\text{- }A_2A_3\text{- }A_4\). As we assume that the dihedral angles \(A_1\text{- }A_2A_3\text{- }A_4, A_1\text{- }A_3A_4\text{- }A_2, A_1\text{- }A_2A_4\text{- }A_3\) are less than or equal to \(\pi /2\), the point H must be on the triangle \(\triangle A_2A_2A_4\) or its boundary, and there exists a point of intersection D of the line segment \(\overline{A_1H}\) and the plane \(\varGamma _{h,T}^{ext}\). Let \((\varGamma _{h,T}^{ext})^\perp \) be a plane that passes through the points \(A_1, H\) and \(A_{1,\perp }\). Obviously, we can choose a point Q, different from H, on the line of intersection of the plane \((\varGamma _{h,T}^{ext})^\perp \) and the plane \(A_2A_2A_4\) such that \(\varGamma _{h,T}^{ext}\cap \overline{A_1Q}\not =\emptyset \). The point of intersection of \(\varGamma _{h,T}^{ext}\) and \(\overline{A_1Q}\) is denoted by E.
Now we focus on the triangle \(\triangle A_1HQ\) (see the right picture in Fig. 5). Let \(\tilde{\lambda }_1\) be the standard 2D linear basis function on the triangle \(\triangle A_1HQ\) associated with the point \(A_1\). Note that \(\lambda _1(H)=\lambda _1(Q)=0\) and \(\lambda _1(A_1)=1\), it holds \(\tilde{\lambda }_1(x)=\lambda _1(x)\) on the plane \((\varGamma _{h,T}^{ext})^\perp \). Since the maximum angle of the triangle \(\triangle A_1HQ\) is equal to \(\pi /2\), using the result of the 2D cases (see the proof of Lemma 1 in Appendix A.1), we obtain

Type II interface element in 3D. The plane \(\varGamma _{h,T}^{ext}\) cuts four edges of the element
For Type II interface element, we take the tetrahedron in Fig. 6 as an illustration. The plane \(\varGamma _{h,\varGamma }^{ext}\) intersects with the edges \(\overline{A_1A_2}, \overline{A_2A_4}, \overline{A_3A_4}\) and \(\overline{A_1A_3}\) at the points \(D_1, D_2, D_3\) and \(D_4\). In view of the limiting cases,
the following relation must be true,
Together with the condition \(\gamma _{max}\le \pi /2\), we conclude that,
Without loss of generality, we assume \(A_1\in T^+\), so we have
Let \((\varGamma _{h,T}^{ext})^\perp \) be the plane that passes through the points \(A_1\) and \(A_4\) and is perpendicular to the plane \(\varGamma _{h,T}^{ext}\). Let Q be the point of intersection of the plane \((\varGamma _{h,T}^{ext})^\perp \) and line \(A_2A_3\).
Now we focus on the triangle \(\triangle A_1QA_4\) (see the right picture in Fig. 6). Let \(\tilde{\lambda }_1\) and \(\tilde{\lambda }_4\) be the standard 2D linear basis functions on the triangle \(\triangle A_1QA_4\) associated with the points \(A_1\) and \(A_4\), respectively. Note that \(\lambda _1(A_4)=\lambda _1(Q)=0\) and \(\lambda _4(A_1)=\lambda _4(Q)=0\), we have \(\tilde{\lambda }_1(x)=\lambda _1(x)\) and \(\tilde{\lambda }_4(x)=\lambda _4(x)\) on the plane \((\varGamma _{h,T}^{ext})^\perp \). Therefore, it holds
which is the same as the Eq. (A.8) for Case II in the 2D cases if we consider the triangle \(\triangle A_1QA_4\). In order to use the result of the 2D cases, we need to verify the angle condition of the triangle \(\triangle A_1QA_4\). In view of the relation (B.5), we consider two cases: \(D_4\text{- }D_1D_2\text{- }A_4\in (0,\pi /2]\) and \(D_4\text{- }D_1D_2\text{- }A_4\in [\pi /2,\pi -A_3\text{- }A_1A_4\text{- }A_2)\). If the dihedral angle \(D_4\text{- }D_1D_2\text{- }A_4\in (0,\pi /2]\), then the point Q is on the ray \(\overrightarrow{A_2A_3}\) and the following relation holds:
Note that the existence of the point Q relies on \(\alpha _{max}\le \pi /2, \gamma _{max}\le \pi /2\) and the relation (B.6).
By the conditions \(\angle A_2A_4A_1\le \alpha _{\max }\le \pi /2\), \(Q\text{- }A_4A_2\text{- }A_1 \le \gamma _{max}\le \pi /2\), and the relation \(Q\text{- }A_1A_4\text{- }A_2<\pi /2\) from (B.6), it is easy to see that \(\angle QA_4A_1\le \pi /2\) (see Fig. 7 for clarity). Analogously, we have \(\angle QA_1A_4\le \pi /2\) since \(Q\text{- }A_1A_4\text{- }A_2<\pi /2, Q\text{- }A_1A_2\text{- }A_4\le \gamma _{\max }\le \pi /2\) and \(\angle A_2A_1A_4 \le \alpha _{\max }\le \pi /2\). In view of the proof of Lemma 1 in Appendix A.1 for Case II, by the relations \(\angle QA_1A_3\le \pi /2\) and \(\angle QA_4A_1\le \pi /2\), we obtain the estimate (B.3). We emphasize that the condition for the angle \(\angle A_1QA_4\) is actually unnecessary when the points D and E are on the edges \(\overline{QA_1}\) and \(\overline{QA_4}\), respectively.
If the dihedral angle \(D_4\text{- }D_1D_2\text{- }A_4\in [\pi /2,\pi -A_3\text{- }A_1A_4\text{- }A_2)\), then the point Q is on the ray \(\overrightarrow{A_2G}\), and it holds \(0\le Q\text{- }A_1A_4\text{- }A_2<\pi /2-A_3\text{- }A_1A_4\text{- }A_2\), where the point G is on the line \(A_2A_3\) but not on the ray \(\overrightarrow{A_2A_3}\) (see Fig. 6). Obviously, we have \(Q\text{- }A_1A_4\text{- }A_3<\pi /2\). Therefore, the proof of \(\angle QA_4A_1\le \pi /2\) and \(\angle QA_1A_4\le \pi /2\) is similar to that of the case \(D_4\text{- }D_1D_2\text{- }A_4\in (0,\pi /2]\). \(\square \)

Estimate the angle \(\angle QA_4A_1\)
1.2 Proof of Lemma 17
Proof
\(:\) Let \(A_i\) be a vertice of the element T, and \(\phi _{A_i}\) be the corresponding IFE basis function. Similar to the 2D cases, using (B.1)–(B.3) we obtain
The function \(\varPsi (x)\) can be constructed explicitly as
Then, we have
which implies \(|\varPsi |^2_{H^m(T^+\cup T^-)}\le Ch^{3-2m}\). The estimates for \(\varUpsilon \) and \(\varTheta _i\) can be obtained similarly by constructing these function as
and
\(\square \)
1.3 Proof of Lemma 12 for the 3D cases
Proof
\(:\) Since \(I_h\phi \) is continuous across each face of the triangulation, it holds
It suffices to estimate the term on an element T with e as its face. By (B.1)–(B.3), we have
Using the identity (B.1) we also have
By the definition of w in (B.2) and the estimate (B.3), we get
which leads to
The desired result (4.48) now follows from (B.7)–(B.9). \(\square \)
1.4 Proof of Lemma 18
Proof
\(:\) Note that \(T^\triangle =(T_h^+\backslash T^+)\cup (T_h^-\backslash T^-)\) is the mis-matched region on T. For any \(\phi \in S_h(T)\), it follows from (B.1)–(B.2) that for \(m=0,1\),
where in the last inequality we have utilized (B.3) and the first inequality in (6.1). The first inequality in (6.1) also implies \(|T^\triangle |/|T|\le Ch\). By the definition of \(\widehat{I_{h}^\mathrm{IFE}}\) in (6.15) and the inequality (B.9) we have
and
Choosing \(\phi =I_{h}^\mathrm{IFE}v\), we get
which together with (B.10) and (B.11) yields the desired results (6.16). \(\square \)
1.5 Proof of Lemma 19
Proof
\(:\) By the Cauchy–Schwarz inequality we have
For any \(\phi \in S_h(T)\), it follows from (B.1)–(B.2) that
where in the last inequality we have used (B.3) and the first inequality in (6.1). Using the fact \(|\varGamma \cap T|\le Ch^2\) which can be obtain by applying the interface trace inequality (see Lemma 3.2 in [49]) to a constant function, we further have
where we have used (B.9) in the last inequality. The lemma follows from the above inequalities and the global trace inequality on \(\varOmega ^-\). \(\square \)
Rights and permissions
About this article

Cite this article
Ji, H., Wang, F., Chen, J. et al. A new parameter free partially penalized immersed finite element and the optimal convergence analysis. Numer. Math. 150, 1035–1086 (2022). https://doi.org/10.1007/s00211-022-01276-1
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00211-022-01276-1